Even though the question is a bit older, I recently had a similar problem when calibrating a camera.
The algorithm is quite simple and based on this paper:
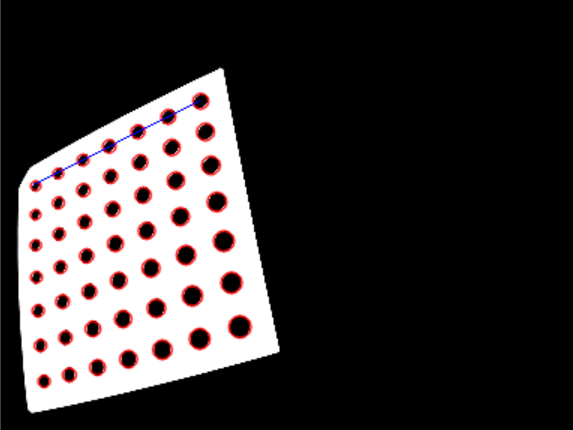
- Find the top left point: min(x+y)
- Find the top right point: max(x-y)
- Create a straight line from the points.
- Calculate the distance of all points to the line
- If it is smaller than the radius of the circle (or a threshold): point is in the top line.
- Otherwise: point is in the rest of the block.
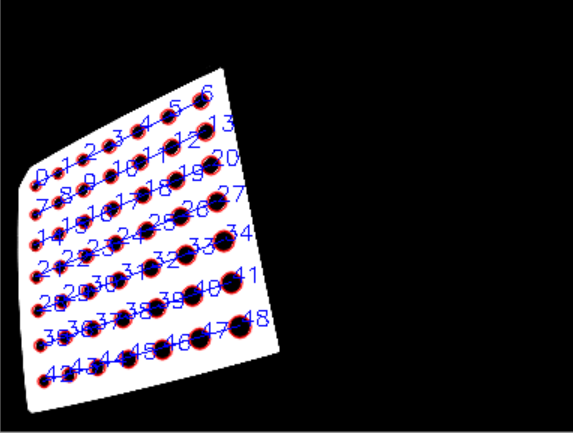
- Sort points of the top line by x value and save.
- Repeat until there are no points left.
My python implementation looks like this:
#detect the keypoints
detector = cv2.SimpleBlobDetector_create(params)
keypoints = detector.detect(img)
img_with_keypoints = cv2.drawKeypoints(img, keypoints, np.array([]), (0, 0, 255),
cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
points = []
keypoints_to_search = keypoints[:]
while len(keypoints_to_search) > 0:
a = sorted(keypoints_to_search, key=lambda p: (p.pt[0]) + (p.pt[1]))[0] # find upper left point
b = sorted(keypoints_to_search, key=lambda p: (p.pt[0]) - (p.pt[1]))[-1] # find upper right point
cv2.line(img_with_keypoints, (int(a.pt[0]), int(a.pt[1])), (int(b.pt[0]), int(b.pt[1])), (255, 0, 0), 1)
# convert opencv keypoint to numpy 3d point
a = np.array([a.pt[0], a.pt[1], 0])
b = np.array([b.pt[0], b.pt[1], 0])
row_points = []
remaining_points = []
for k in keypoints_to_search:
p = np.array([k.pt[0], k.pt[1], 0])
d = k.size # diameter of the keypoint (might be a theshold)
dist = np.linalg.norm(np.cross(np.subtract(p, a), np.subtract(b, a))) / np.linalg.norm(b) # distance between keypoint and line a->b
if d/2 > dist:
row_points.append(k)
else:
remaining_points.append(k)
points.extend(sorted(row_points, key=lambda h: h.pt[0]))
keypoints_to_search = remaining_points
![Uppermost line]()
![Numerated points]()