Steps:
- Image PreProcessing ( closing operation )
- Finding Sudoku Square and Creating Mask Image
- Finding Vertical lines
- Finding Horizontal Lines
- Finding Grid Points
- Correcting the defects
- Extracting the digits from each cell
Code:
# ==========import the necessary packages============
import imutils
import numpy as np
import cv2
from transform import four_point_transform
from PIL import Image
import pytesseract
import math
from skimage.filters import threshold_local
# =============== For Transformation ==============
def order_points(pts):
"""initialzie a list of coordinates that will be ordered
such that the first entry in the list is the top-left,
the second entry is the top-right, the third is the
bottom-right, and the fourth is the bottom-left"""
rect = np.zeros((4, 2), dtype = "float32")
# the top-left point will have the smallest sum, whereas
# the bottom-right point will have the largest sum
s = pts.sum(axis = 1)
rect[0] = pts[np.argmin(s)]
rect[2] = pts[np.argmax(s)]
# now, compute the difference between the points, the
# top-right point will have the smallest difference,
# whereas the bottom-left will have the largest difference
diff = np.diff(pts, axis = 1)
rect[1] = pts[np.argmin(diff)]
rect[3] = pts[np.argmax(diff)]
# return the ordered coordinates
return rect
def four_point_transform(image, pts):
# obtain a consistent order of the points and unpack them
# individually
rect = order_points(pts)
(tl, tr, br, bl) = rect
# compute the width of the new image, which will be the
# maximum distance between bottom-right and bottom-left
# x-coordiates or the top-right and top-left x-coordinates
widthA = np.sqrt(((br[0] - bl[0]) ** 2) + ((br[1] - bl[1]) ** 2))
widthB = np.sqrt(((tr[0] - tl[0]) ** 2) + ((tr[1] - tl[1]) ** 2))
maxWidth = max(int(widthA), int(widthB))
# compute the height of the new image, which will be the
# maximum distance between the top-right and bottom-right
# y-coordinates or the top-left and bottom-left y-coordinates
heightA = np.sqrt(((tr[0] - br[0]) ** 2) + ((tr[1] - br[1]) ** 2))
heightB = np.sqrt(((tl[0] - bl[0]) ** 2) + ((tl[1] - bl[1]) ** 2))
maxHeight = max(int(heightA), int(heightB))
# now that we have the dimensions of the new image, construct
# the set of destination points to obtain a "birds eye view",
# (i.e. top-down view) of the image, again specifying points
# in the top-left, top-right, bottom-right, and bottom-left
# order
dst = np.array([
[0, 0],
[maxWidth - 1, 0],
[maxWidth - 1, maxHeight - 1],
[0, maxHeight - 1]], dtype = "float32")
# compute the perspective transform matrix and then apply it
M = cv2.getPerspectiveTransform(rect, dst)
warped = cv2.warpPerspective(image, M, (maxWidth, maxHeight))
# return the warped image
return warped
############## To show image ##############
def show_image(img,title):
cv2.imshow(title, img)
cv2.waitKey(0)
cv2.destroyAllWindows()
def find_largest_feature(inp_img, scan_tl=None, scan_br=None):
"""
Uses the fact the `floodFill` function returns a bounding box of the area it filled to find the biggest
connected pixel structure in the image. Fills this structure in white, reducing the rest to black.
"""
img = inp_img.copy() # Copy the image, leaving the original untouched
height, width = img.shape[:2]
max_area = 0
seed_point = (None, None)
if scan_tl is None:
scan_tl = [0, 0]
if scan_br is None:
scan_br = [width, height]
# Loop through the image
for x in range(scan_tl[0], scan_br[0]):
for y in range(scan_tl[1], scan_br[1]):
# Only operate on light or white squares
if img.item(y, x) == 255 and x < width and y < height: # Note that .item() appears to take input as y, x
area = cv2.floodFill(img, None, (x, y), 64)
if area[0] > max_area: # Gets the maximum bound area which should be the grid
max_area = area[0]
seed_point = (x, y)
# Colour everything grey (compensates for features outside of our middle scanning range
for x in range(width):
for y in range(height):
if img.item(y, x) == 255 and x < width and y < height:
cv2.floodFill(img, None, (x, y), 64)
mask = np.zeros((height + 2, width + 2), np.uint8) # Mask that is 2 pixels bigger than the image
# Highlight the main feature
if all([p is not None for p in seed_point]):
cv2.floodFill(img, mask, seed_point, 255)
for x in range(width):
for y in range(height):
if img.item(y, x) == 64: # Hide anything that isn't the main feature
cv2.floodFill(img, mask, (x, y), 0)
return img
################# Preprocessing of sudoku image ###############
def preprocess(image,case):
ratio = image.shape[0] / 500.0
orig = image.copy()
image = imutils.resize(image, height = 500)
if case == True:
gray = cv2.GaussianBlur(image,(5,5),0)
gray = cv2.cvtColor(gray,cv2.COLOR_BGR2GRAY)
mask = np.zeros((gray.shape),np.uint8)
kernel1 = cv2.getStructuringElement(cv2.MORPH_ELLIPSE,(11,11))
close = cv2.morphologyEx(gray,cv2.MORPH_CLOSE,kernel1)
div = np.float32(gray)/(close)
res = np.uint8(cv2.normalize(div,div,0,255,cv2.NORM_MINMAX))
res2 = cv2.cvtColor(res,cv2.COLOR_GRAY2BGR)
edged = cv2.Canny(res, 75, 200)
cnts = cv2.findContours(edged.copy(), cv2.RETR_LIST,cv2.CHAIN_APPROX_SIMPLE)
cnts = cnts[0] if imutils.is_cv2() else cnts[1]
cnts = sorted(cnts, key = cv2.contourArea, reverse = True)[:5]
# loop over the contours
for c in cnts:
# approximate the contour
rect = cv2.boundingRect(c)
area = cv2.contourArea(c)
cv2.rectangle(edged.copy(), (rect[0],rect[1]), (rect[2]+rect[0],rect[3]+rect[1]), (0,0,0), 2)
peri = cv2.arcLength(c, True)
approx = cv2.approxPolyDP(c, 0.02 * peri, True)
# if our approximated contour has four points, then we
# can assume that we have found our screen
if len(approx) == 4:
screenCnt = approx
#print(screenCnt)
break
# show the contour (outline) of the piece of paper
#print(screenCnt)
cv2.drawContours(image, [screenCnt], -1, (0, 255, 0), 2)
# apply the four point transform to obtain a top-down
# view of the original image
warped = four_point_transform(orig, screenCnt.reshape(4, 2) * ratio)
warped1 = cv2.resize(warped,(610,610))
warp = cv2.cvtColor(warped, cv2.COLOR_BGR2GRAY)
T = threshold_local(warp, 11, offset = 10, method = "gaussian")
warp = (warp > T).astype("uint8") * 255
th3 = cv2.adaptiveThreshold(warp,255,cv2.ADAPTIVE_THRESH_GAUSSIAN_C,\
cv2.THRESH_BINARY_INV,11,2)
kernel = np.ones((5,5),np.uint8)
dilation =cv2.GaussianBlur(th3,(5,5),0)
else :
warped = image
warped1 = cv2.resize(warped,(610,610))
warp = cv2.cvtColor(warped, cv2.COLOR_BGR2GRAY)
T = threshold_local(warp, 11, offset = 10, method = "gaussian")
warp = (warp > T).astype("uint8") * 255
th3 = cv2.adaptiveThreshold(warp,255,cv2.ADAPTIVE_THRESH_GAUSSIAN_C,\
cv2.THRESH_BINARY_INV,11,2)
#show_image(warped1,"preprocessed")
return th3,warped1,warped
def grids(img,warped2):
#print("im:",img.shape)
img2 = img.copy()
img = np.zeros((500,500,3), np.uint8)
ratio2 = 3
kernel_size = 3
lowThreshold = 30
frame = img
img = cv2.resize(frame,(610,610))
for i in range(10):
cv2.line(img, (0,(img.shape[0]//9)*i),(img.shape[1],(img.shape[0]//9)*i), (255, 255, 255), 3, 1)
cv2.line(warped2, (0,(img.shape[0]//9)*i),(img.shape[1],(img.shape[0]//9)*i), (125, 0, 55), 3, 1)
for j in range(10):
cv2.line(img, ((img.shape[1]//9)*j, 0), ((img.shape[1]//9)*j, img.shape[0]), (255, 255, 255), 3, 1)
cv2.line(warped2, ((img.shape[1]//9)*j, 0), ((img.shape[1]//9)*j, img.shape[0]), (125, 0, 55), 3, 1)
#show_image(warped2,"grids")
return img
############### Finding out the intersection pts to get the grids #########
def grid_points(img,warped2):
img1 = img.copy()
kernelx = cv2.getStructuringElement(cv2.MORPH_RECT,(2,10))
dx = cv2.Sobel(img,cv2.CV_16S,1,0)
dx = cv2.convertScaleAbs(dx)
c=cv2.normalize(dx,dx,0,255,cv2.NORM_MINMAX)
c = cv2.morphologyEx(c,cv2.MORPH_DILATE,kernelx,iterations = 1)
cy = cv2.cvtColor(c,cv2.COLOR_BGR2GRAY)
closex = cv2.morphologyEx(cy,cv2.MORPH_DILATE,kernelx,iterations = 1)
kernely = cv2.getStructuringElement(cv2.MORPH_RECT,(10,2))
dy = cv2.Sobel(img,cv2.CV_16S,0,2)
dy = cv2.convertScaleAbs(dy)
c = cv2.normalize(dy,dy,0,255,cv2.NORM_MINMAX)
c = cv2.morphologyEx(c,cv2.MORPH_DILATE,kernely,iterations = 1)
cy = cv2.cvtColor(c,cv2.COLOR_BGR2GRAY)
closey = cv2.morphologyEx(cy,cv2.MORPH_DILATE,kernelx,iterations = 1)
res = cv2.bitwise_and(closex,closey)
#gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(res,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU)
kernel = np.ones((6,6),np.uint8)
# Perform morphology
se = np.ones((8,8), dtype='uint8')
image_close = cv2.morphologyEx(thresh, cv2.MORPH_CLOSE, se)
image_close = cv2.morphologyEx(image_close, cv2.MORPH_OPEN, kernel)
contour, hier = cv2.findContours (image_close,cv2.RETR_LIST,cv2.CHAIN_APPROX_SIMPLE)
cnts = sorted(contour, key=cv2.contourArea, reverse=True)[:100]
centroids = []
for cnt in cnts:
mom = cv2.moments(cnt)
(x,y) = int(mom['m10']/mom['m00']), int(mom['m01']/mom['m00'])
cv2.circle(img1,(x,y),4,(0,255,0),-1)
cv2.circle(warped2,(x,y),4,(0,255,0),-1)
centroids.append((x,y))
#show_image(warped2,"grid_points")
Points = np.array(centroids,dtype = np.float32)
c = Points.reshape((100,2))
c2 = c[np.argsort(c[:,1])]
b = np.vstack([c2[i*10:(i+1)*10][np.argsort(c2[i*10:(i+1)*10,0])] for i in range(10)])
bm = b.reshape((10,10,2))
return c2,bm,cnts
############ Recognize digit images to number #############
def image_to_num(c2):
img = 255-c2
text = pytesseract.image_to_string(img, lang="eng",config='--psm 6 --oem 3') #builder=builder)
return list(text)[0]
###### To get the digit at the particular cell #############
def get_digit(c2,bm,warped1,cnts):
num = []
centroidx = np.empty((9, 9))
centroidy = np.empty((9, 9))
global list_images
list_images = []
for i in range(0,9):
for j in range(0,9):
x1,y1 = bm[i][j] # bm[0] row1
x2,y2 = bm[i+1][j+1]
coordx = ((x1+x2)//2)
coordy = ((y1+y2)//2)
centroidx[i][j] = coordx
centroidy[i][j] = coordy
crop = warped1[int(x1):int(x2),int(y1):int(y2)]
crop = imutils.resize(crop, height=69,width=67)
c2 = cv2.cvtColor(crop, cv2.COLOR_BGR2GRAY)
c2 = cv2.adaptiveThreshold(c2,255,cv2.ADAPTIVE_THRESH_GAUSSIAN_C,\
cv2.THRESH_BINARY_INV,11,2)
kernel = np.ones((2,2),np.uint8)
#c2 = cv2.morphologyEx(c2, cv2.MORPH_OPEN, kernel)
c2= cv2.copyMakeBorder(c2,5,5,5,5,cv2.BORDER_CONSTANT,value=(0,0,0))
no = 0
shape=c2.shape
w=shape[1]
h=shape[0]
mom = cv2.moments(c2)
(x,y) = int(mom['m10']/mom['m00']), int(mom['m01']/mom['m00'])
c2 = c2[14:70,15:62]
contour, hier = cv2.findContours (c2,cv2.RETR_LIST,cv2.CHAIN_APPROX_SIMPLE)
if cnts is not None:
cnts = sorted(contour, key=cv2.contourArea,reverse=True)[:1]
for cnt in cnts:
x,y,w,h = cv2.boundingRect(cnt)
aspect_ratio = w/h
# print(aspect_ratio)
area = cv2.contourArea(cnt)
#print(area)
if area>120 and cnt.shape[0]>15 and aspect_ratio>0.2 and aspect_ratio<=0.9 :
#print("area:",area)
c2 = find_largest_feature(c2)
#show_image(c2,"box2")
contour, hier = cv2.findContours (c2,cv2.RETR_LIST,cv2.CHAIN_APPROX_SIMPLE)
cnts = sorted(contour, key=cv2.contourArea,reverse=True)[:1]
for cnt in cnts:
rect = cv2.boundingRect(cnt)
#cv2.rectangle(c2, (rect[0],rect[1]), (rect[2]+rect[0],rect[3]+rect[1]), (255,255,255), 2)
c2 = c2[rect[1]:rect[3]+rect[1],rect[0]:rect[2]+rect[0]]
c2= cv2.copyMakeBorder(c2,5,5,5,5,cv2.BORDER_CONSTANT,value=(0,0,0))
list_images.append(c2)
#show_image(c2,"box")
no = image_to_num(c2)
num.append(no)
centroidx = np.transpose(centroidx)
centroidy = np.transpose(centroidy)
return c2, num, centroidx, centroidy
######## creating matrix and filling numbers exist in the orig image #######
def sudoku_matrix(num):
c = 0
grid = np.empty((9, 9))
for i in range(9):
for j in range(9):
grid[i][j] = int(num[c])
c += 1
grid = np.transpose(grid)
return grid
######## Creating board to show the puzzle result in terminal##############
def board(arr):
for i in range(9):
if i%3==0 :
print("+",end="")
print("-------+"*3)
for j in range(9):
if j%3 ==0 :
print("",end="| ")
print(int(arr[i][j]),end=" ")
print("",end="|")
print()
print("+",end="")
print("-------+"*3)
return arr
def check_col(arr,num,col):
if all([num != arr[i][col] for i in range(9)]):
return True
return False
def check_row(arr,num,row):
if all([num != arr[row][i] for i in range(9)]):
return True
return False
def check_cell(arr,num,row,col):
sectopx = 3 * (row//3)
sectopy = 3 * (col//3)
for i in range(sectopx, sectopx+3):
for j in range(sectopy, sectopy+3):
if arr[i][j] == num:
return True
return False
def empty_loc(arr,l):
for i in range(9):
for j in range(9):
if arr[i][j] == 0:
l[0]=i
l[1]=j
return True
return False
#### Solving sudoku by back tracking############
def sudoku(arr):
l=[0,0]
if not empty_loc(arr,l):
return True
row = l[0]
col = l[1]
for num in range(1,10):
if check_row(arr,num,row) and check_col(arr,num,col) and not check_cell(arr,num,row,col):
arr[row][col] = int(num)
if(sudoku(arr)):
return True
# failure, unmake & try again
arr[row][col] = 0
return False
def overlay(arr,num,img,cx,cy):
no = -1
for i in range(9):
for j in range(9):
no += 1
#cv2.putText(img,str(no), (int(cx[i][j]),int(cy[i][j])),cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 0), 2)
if num[no] == 0:
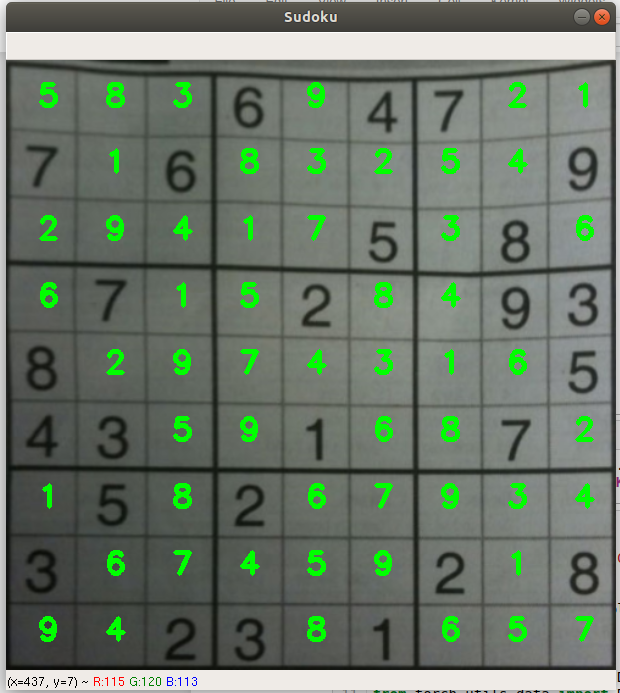
cv2.putText(img,str(int(arr[j][i])), (int(cx[i][j]-4),int(cy[i][j])+8),cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 4)
cv2.imshow("Sudoku",img)
cv2.waitKey(0)
case = "False" # If transformation is required set True
image = cv2.imread("QupKb.png")
th3,warped1,warped = preprocess(image,case)
warped2 = warped1.copy()
img = grids(warped,warped2)
c2,bm,cnts = grid_points(img,warped2)
c2,num,cx,cy = get_digit(c2,bm,warped1,cnts)
grid = sudoku_matrix(num)
if(sudoku(grid)):
arr = board(grid)
overlay(arr,num,warped1,cx,cy)
else:
print("There is no solution")
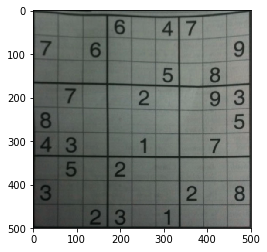
warped:
![warped]()
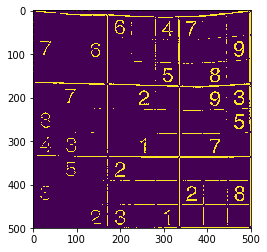
th3:
![th3]()
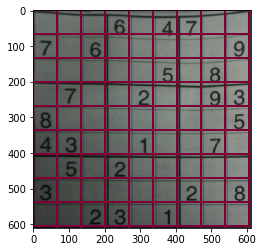
warped2:
![warped2]()
sudoku result:
![enter image description here]()
All the extracted digits:
########## To view all the extracted digits ###############
_, axs = plt.subplots(1, len(list_images), figsize=(24, 24))
axs = axs.flatten()
for img, ax in zip(list_images, axs):
ax.imshow(cv2.resize(img,(64,64)))
plt.show()
![digits]()
References: