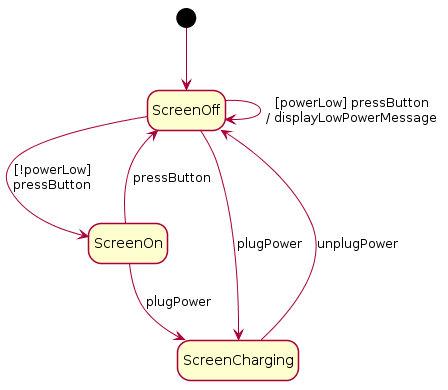
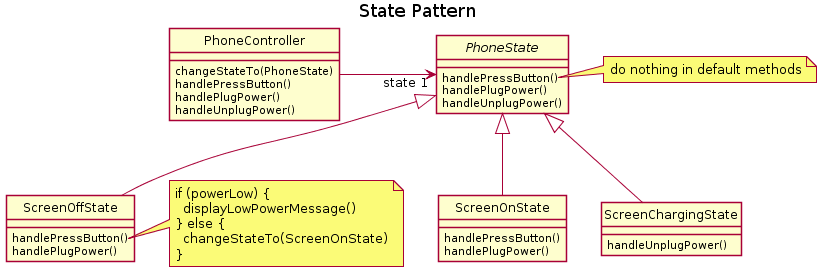
One of my favourite patterns is the state design pattern. Respond or behave differently to the same given set of inputs.
One of the problems with using switch/case statements for state machines is that as you create more states, the switch/cases becomes harder/unwieldy to read/maintain, promotes unorganized spaghetti code, and increasingly difficult to change without breaking something. I find using design patterns helps me to organize my data better, which is the whole point of abstraction.
Instead of designing your state code around what state you came from, instead structure your code so that it records the state when you enter a new state. That way, you effectively get a record of your previous state. I like @JoshPetit's answer, and have taken his solution one step further, taken straight from the GoF book:
stateCtxt.h:
#define STATE (void *)
typedef enum fsmSignal
{
eEnter =0,
eNormal,
eExit
}FsmSignalT;
typedef struct fsm
{
FsmSignalT signal;
// StateT is an enum that you can define any which way you want
StateT currentState;
}FsmT;
extern int STATECTXT_Init(void);
/* optionally allow client context to set the target state */
extern STATECTXT_Set(StateT stateID);
extern void STATECTXT_Handle(void *pvEvent);
stateCtxt.c:
#include "stateCtxt.h"
#include "statehandlers.h"
typedef STATE (*pfnStateT)(FsmSignalT signal, void *pvEvent);
static FsmT fsm;
static pfnStateT UsbState ;
int STATECTXT_Init(void)
{
UsbState = State1;
fsm.signal = eEnter;
// use an enum for better maintainability
fsm.currentState = '1';
(*UsbState)( &fsm, pvEvent);
return 0;
}
static void ChangeState( FsmT *pFsm, pfnStateT targetState )
{
// Check to see if the state has changed
if (targetState != NULL)
{
// Call current state's exit event
pFsm->signal = eExit;
STATE dummyState = (*UsbState)( pFsm, pvEvent);
// Update the State Machine structure
UsbState = targetState ;
// Call the new state's enter event
pFsm->signal = eEnter;
dummyState = (*UsbState)( pFsm, pvEvent);
}
}
void STATECTXT_Handle(void *pvEvent)
{
pfnStateT newState;
if (UsbState != NULL)
{
fsm.signal = eNormal;
newState = (*UsbState)( &fsm, pvEvent );
ChangeState( &fsm, newState );
}
}
void STATECTXT_Set(StateT stateID)
{
prevState = UsbState;
switch (stateID)
{
case '1':
ChangeState( State1 );
break;
case '2':
ChangeState( State2);
break;
case '3':
ChangeState( State3);
break;
}
}
statehandlers.h:
/* define state handlers */
extern STATE State1(void);
extern STATE State2(void);
extern STATE State3(void);
statehandlers.c:
#include "stateCtxt.h:"
/* Define behaviour to given set of inputs */
STATE State1(FsmT *fsm, void *pvEvent)
{
STATE nextState;
/* do some state specific behaviours
* here
*/
/* fsm->currentState currently contains the previous state
* just before it gets updated, so you can implement behaviours
* which depend on previous state here
*/
fsm->currentState = '1';
/* Now, specify the next state
* to transition to, or return null if you're still waiting for
* more stuff to process.
*/
switch (fsm->signal)
{
case eEnter:
nextState = State2;
break;
case eNormal:
nextState = null;
break;
case eExit:
nextState = State2;
break;
}
return nextState;
}
STATE State3(FsmT *fsm, void *pvEvent)
{
/* do some state specific behaviours
* here
*/
fsm->currentState = '2';
/* Now, specify the next state
* to transition to
*/
return State1;
}
STATE State2(FsmT *fsm, void *pvEvent)
{
/* do some state specific behaviours
* here
*/
fsm->currentState = '3';
/* Now, specify the next state
* to transition to
*/
return State3;
}
For most State Machines, esp. Finite state machines, each state will know what its next state should be, and the criteria for transitioning to its next state. For loose state designs, this may not be the case, hence the option to expose the API for transitioning states. If you desire more abstraction, each state handler can be separated out into its own file, which are equivalent to the concrete state handlers in the GoF book. If your design is simple with only a few states, then both stateCtxt.c and statehandlers.c can be combined into a single file for simplicity.