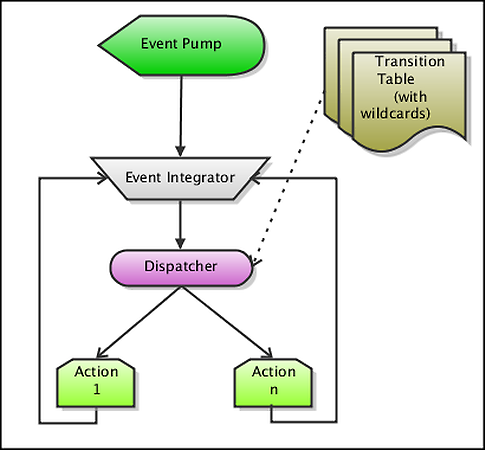
Here is an example of a Finite State Machine for Linux that uses message queues as the events. The events are put on the queue and handled in order. The state changes depending on what happens for each event.
This is an example for a data connection with states like:
- Uninitialized
- Initialized
- Connected
- MTU Negotiated
- Authenticated
One little extra feature I added was a timestamp for each message/event. The event handler will ignore events that are too old (they have expired). This can happen a lot in the real world where you might get stuck in a state unexpectedly.
This example runs on Linux, use the Makefile below to compile it and play around with it.
state_machine.c
#include <stdio.h>
#include <stdint.h>
#include <assert.h>
#include <unistd.h> // sysconf()
#include <errno.h> // errno
#include <string.h> // strerror()
#include <sys/time.h> // gettimeofday()
#include <fcntl.h> // For O_* constants
#include <sys/stat.h> // For mode constants
#include <mqueue.h>
#include <poll.h>
//------------------------------------------------
// States
//------------------------------------------------
typedef enum
{
ST_UNKNOWN = 0,
ST_UNINIT,
ST_INIT,
ST_CONNECTED,
ST_MTU_NEGOTIATED,
ST_AUTHENTICATED,
ST_ERROR,
ST_DONT_CHANGE,
ST_TERM,
} fsmState_t;
//------------------------------------------------
// Events
//------------------------------------------------
typedef enum
{
EV_UNKNOWN = 0,
EV_INIT_SUCCESS,
EV_INIT_FAIL,
EV_MASTER_CMD_MSG,
EV_CONNECT_SUCCESS,
EV_CONNECT_FAIL,
EV_MTU_SUCCESS,
EV_MTU_FAIL,
EV_AUTH_SUCCESS,
EV_AUTH_FAIL,
EV_TX_SUCCESS,
EV_TX_FAIL,
EV_DISCONNECTED,
EV_DISCON_FAILED,
EV_LAST_ENTRY,
} fsmEvName_t;
typedef struct fsmEvent_type
{
fsmEvName_t name;
struct timeval genTime; // Time the event was generated.
// This allows us to see how old the event is.
} fsmEvent_t;
// Finite State Machine Data Members
typedef struct fsmData_type
{
int connectTries;
int MTUtries;
int authTries;
int txTries;
} fsmData_t;
// Each row of the state table
typedef struct stateTable_type {
fsmState_t st; // Current state
fsmEvName_t evName; // Got this event
int (*conditionfn)(void *); // If this condition func returns TRUE
fsmState_t nextState; // Change to this state and
void (*fn)(void *); // Run this function
} stateTable_t;
// Finite State Machine state structure
typedef struct fsm_type
{
const stateTable_t *pStateTable; // Pointer to state table
int numStates; // Number of entries in the table
fsmState_t currentState; // Current state
fsmEvent_t currentEvent; // Current event
fsmData_t *fsmData; // Pointer to the data attributes
mqd_t mqdes; // Message Queue descriptor
mqd_t master_cmd_mqdes; // Master command message queue
} fsm_t;
// Wildcard events and wildcard state
#define EV_ANY -1
#define ST_ANY -1
#define TRUE (1)
#define FALSE (0)
// Maximum priority for message queues (see "man mq_overview")
#define FSM_PRIO (sysconf(_SC_MQ_PRIO_MAX) - 1)
static void addev (fsm_t *fsm, fsmEvName_t ev);
static void doNothing (void *fsm) {addev(fsm, EV_MASTER_CMD_MSG);}
static void doInit (void *fsm) {addev(fsm, EV_INIT_SUCCESS);}
static void doConnect (void *fsm) {addev(fsm, EV_CONNECT_SUCCESS);}
static void doMTU (void *fsm) {addev(fsm, EV_MTU_SUCCESS);}
static void reportFailConnect (void *fsm) {addev(fsm, EV_ANY);}
static void doAuth (void *fsm) {addev(fsm, EV_AUTH_SUCCESS);}
static void reportDisConnect (void *fsm) {addev(fsm, EV_ANY);}
static void doDisconnect (void *fsm) {addev(fsm, EV_ANY);}
static void doTransaction (void *fsm) {addev(fsm, EV_TX_FAIL);}
static void fsmError (void *fsm) {addev(fsm, EV_ANY);}
static int currentlyLessThanMaxConnectTries (void *fsm) {
fsm_t *l = (fsm_t *)fsm;
return (l->fsmData->connectTries < 5 ? TRUE : FALSE);
}
static int isMoreThanMaxConnectTries (void *fsm) {return TRUE;}
static int currentlyLessThanMaxMTUtries (void *fsm) {return TRUE;}
static int isMoreThanMaxMTUtries (void *fsm) {return TRUE;}
static int currentyLessThanMaxAuthTries (void *fsm) {return TRUE;}
static int isMoreThanMaxAuthTries (void *fsm) {return TRUE;}
static int currentlyLessThanMaxTXtries (void *fsm) {return FALSE;}
static int isMoreThanMaxTXtries (void *fsm) {return TRUE;}
static int didNotSelfDisconnect (void *fsm) {return TRUE;}
static int waitForEvent (fsm_t *fsm);
static void runEvent (fsm_t *fsm);
static void runStateMachine(fsm_t *fsm);
static int newEventIsValid(fsmEvent_t *event);
static void getTime(struct timeval *time);
void printState(fsmState_t st);
void printEvent(fsmEvName_t ev);
// Global State Table
const stateTable_t GST[] = {
// Current state Got this event If this condition func returns TRUE Change to this state and Run this function
{ ST_UNINIT, EV_INIT_SUCCESS, NULL, ST_INIT, &doNothing },
{ ST_UNINIT, EV_INIT_FAIL, NULL, ST_UNINIT, &doInit },
{ ST_INIT, EV_MASTER_CMD_MSG, NULL, ST_INIT, &doConnect },
{ ST_INIT, EV_CONNECT_SUCCESS, NULL, ST_CONNECTED, &doMTU },
{ ST_INIT, EV_CONNECT_FAIL, ¤tlyLessThanMaxConnectTries, ST_INIT, &doConnect },
{ ST_INIT, EV_CONNECT_FAIL, &isMoreThanMaxConnectTries, ST_INIT, &reportFailConnect },
{ ST_CONNECTED, EV_MTU_SUCCESS, NULL, ST_MTU_NEGOTIATED, &doAuth },
{ ST_CONNECTED, EV_MTU_FAIL, ¤tlyLessThanMaxMTUtries, ST_CONNECTED, &doMTU },
{ ST_CONNECTED, EV_MTU_FAIL, &isMoreThanMaxMTUtries, ST_CONNECTED, &doDisconnect },
{ ST_CONNECTED, EV_DISCONNECTED, &didNotSelfDisconnect, ST_INIT, &reportDisConnect },
{ ST_MTU_NEGOTIATED, EV_AUTH_SUCCESS, NULL, ST_AUTHENTICATED, &doTransaction },
{ ST_MTU_NEGOTIATED, EV_AUTH_FAIL, ¤tyLessThanMaxAuthTries, ST_MTU_NEGOTIATED, &doAuth },
{ ST_MTU_NEGOTIATED, EV_AUTH_FAIL, &isMoreThanMaxAuthTries, ST_MTU_NEGOTIATED, &doDisconnect },
{ ST_MTU_NEGOTIATED, EV_DISCONNECTED, &didNotSelfDisconnect, ST_INIT, &reportDisConnect },
{ ST_AUTHENTICATED, EV_TX_SUCCESS, NULL, ST_AUTHENTICATED, &doDisconnect },
{ ST_AUTHENTICATED, EV_TX_FAIL, ¤tlyLessThanMaxTXtries, ST_AUTHENTICATED, &doTransaction },
{ ST_AUTHENTICATED, EV_TX_FAIL, &isMoreThanMaxTXtries, ST_AUTHENTICATED, &doDisconnect },
{ ST_AUTHENTICATED, EV_DISCONNECTED, &didNotSelfDisconnect, ST_INIT, &reportDisConnect },
{ ST_ANY, EV_DISCON_FAILED, NULL, ST_DONT_CHANGE, &doDisconnect },
{ ST_ANY, EV_ANY, NULL, ST_UNINIT, &fsmError } // Wildcard state for errors
};
#define GST_COUNT (sizeof(GST)/sizeof(stateTable_t))
int main()
{
int ret = 0;
fsmData_t dataAttr;
dataAttr.connectTries = 0;
dataAttr.MTUtries = 0;
dataAttr.authTries = 0;
dataAttr.txTries = 0;
fsm_t lfsm;
memset(&lfsm, 0, sizeof(fsm_t));
lfsm.pStateTable = GST;
lfsm.numStates = GST_COUNT;
lfsm.currentState = ST_UNINIT;
lfsm.currentEvent.name = EV_ANY;
lfsm.fsmData = &dataAttr;
struct mq_attr attr;
attr.mq_maxmsg = 30;
attr.mq_msgsize = sizeof(fsmEvent_t);
// Dev info
//printf("Size of fsmEvent_t [%ld]\n", sizeof(fsmEvent_t));
ret = mq_unlink("/abcmq");
if (ret == -1) {
fprintf(stderr, "Error on mq_unlink(), errno[%d] strerror[%s]\n",
errno, strerror(errno));
}
lfsm.mqdes = mq_open("/abcmq", O_CREAT | O_RDWR, S_IWUSR | S_IRUSR, &attr);
if (lfsm.mqdes == (mqd_t)-1) {
fprintf(stderr, "Error on mq_open(), errno[%d] strerror[%s]\n",
errno, strerror(errno));
return -1;
}
doInit(&lfsm); // This will generate the first event
runStateMachine(&lfsm);
return 0;
}
static void runStateMachine(fsm_t *fsm)
{
int ret = 0;
if (fsm == NULL) {
fprintf(stderr, "[%s] NULL argument\n", __func__);
return;
}
// Cycle through the state machine
while (fsm->currentState != ST_TERM) {
printf("current state [");
printState(fsm->currentState);
printf("]\n");
ret = waitForEvent(fsm);
if (ret == 0) {
printf("got event [");
printEvent(fsm->currentEvent.name);
printf("]\n");
runEvent(fsm);
}
sleep(2);
}
}
static int waitForEvent(fsm_t *fsm)
{
//const int numFds = 2;
const int numFds = 1;
struct pollfd fds[numFds];
int timeout_msecs = -1; // -1 is forever
int ret = 0;
int i = 0;
ssize_t num = 0;
fsmEvent_t newEv;
if (fsm == NULL) {
fprintf(stderr, "[%s] NULL argument\n", __func__);
return -1;
}
fsm->currentEvent.name = EV_ANY;
fds[0].fd = fsm->mqdes;
fds[0].events = POLLIN;
//fds[1].fd = fsm->master_cmd_mqdes;
//fds[1].events = POLLIN;
ret = poll(fds, numFds, timeout_msecs);
if (ret > 0) {
// An event on one of the fds has occurred
for (i = 0; i < numFds; i++) {
if (fds[i].revents & POLLIN) {
// Data may be read on device number i
num = mq_receive(fds[i].fd, (void *)(&newEv),
sizeof(fsmEvent_t), NULL);
if (num == -1) {
fprintf(stderr, "Error on mq_receive(), errno[%d] "
"strerror[%s]\n", errno, strerror(errno));
return -1;
}
if (newEventIsValid(&newEv)) {
fsm->currentEvent = newEv;
} else {
return -1;
}
}
}
} else {
fprintf(stderr, "Error on poll(), ret[%d] errno[%d] strerror[%s]\n",
ret, errno, strerror(errno));
return -1;
}
return 0;
}
static int newEventIsValid(fsmEvent_t *event)
{
if (event == NULL) {
fprintf(stderr, "[%s] NULL argument\n", __func__);
return FALSE;
}
printf("[%s]\n", __func__);
struct timeval now;
getTime(&now);
if ( (event->name < EV_LAST_ENTRY) &&
((now.tv_sec - event->genTime.tv_sec) < (60*5))
)
{
return TRUE;
} else {
return FALSE;
}
}
//------------------------------------------------
// Performs event handling on the FSM (finite state machine).
// Make sure there is a wildcard state at the end of
// your table, otherwise; the event will be ignored.
//------------------------------------------------
static void runEvent(fsm_t *fsm)
{
int i;
int condRet = 0;
if (fsm == NULL) {
fprintf(stderr, "[%s] NULL argument\n", __func__);
return;
}
printf("[%s]\n", __func__);
// Find a relevant entry for this state and event
for (i = 0; i < fsm->numStates; i++) {
// Look in the table for our current state or ST_ANY
if ( (fsm->pStateTable[i].st == fsm->currentState) ||
(fsm->pStateTable[i].st == ST_ANY)
)
{
// Is this the event we are looking for?
if ( (fsm->pStateTable[i].evName == fsm->currentEvent.name) ||
(fsm->pStateTable[i].evName == EV_ANY)
)
{
if (fsm->pStateTable[i].conditionfn != NULL) {
condRet = fsm->pStateTable[i].conditionfn(fsm->fsmData);
}
// See if there is a condition associated
// or we are not looking for any condition
//
if ( (condRet != 0) || (fsm->pStateTable[i].conditionfn == NULL))
{
// Set the next state (if applicable)
if (fsm->pStateTable[i].nextState != ST_DONT_CHANGE) {
fsm->currentState = fsm->pStateTable[i].nextState;
printf("new state [");
printState(fsm->currentState);
printf("]\n");
}
// Call the state callback function
fsm->pStateTable[i].fn(fsm);
break;
}
}
}
}
}
//------------------------------------------------
// EVENT HANDLERS
//------------------------------------------------
static void getTime(struct timeval *time)
{
if (time == NULL) {
fprintf(stderr, "[%s] NULL argument\n", __func__);
return;
}
printf("[%s]\n", __func__);
int ret = gettimeofday(time, NULL);
if (ret != 0) {
fprintf(stderr, "gettimeofday() failed: errno [%d], strerror [%s]\n",
errno, strerror(errno));
memset(time, 0, sizeof(struct timeval));
}
}
static void addev (fsm_t *fsm, fsmEvName_t ev)
{
int ret = 0;
if (fsm == NULL) {
fprintf(stderr, "[%s] NULL argument\n", __func__);
return;
}
printf("[%s] ev[%d]\n", __func__, ev);
if (ev == EV_ANY) {
// Don't generate a new event, just return...
return;
}
fsmEvent_t newev;
getTime(&(newev.genTime));
newev.name = ev;
ret = mq_send(fsm->mqdes, (void *)(&newev), sizeof(fsmEvent_t), FSM_PRIO);
if (ret == -1) {
fprintf(stderr, "[%s] mq_send() failed: errno [%d], strerror [%s]\n",
__func__, errno, strerror(errno));
}
}
//------------------------------------------------
// end EVENT HANDLERS
//------------------------------------------------
void printState(fsmState_t st)
{
switch(st) {
case ST_UNKNOWN:
printf("ST_UNKNOWN");
break;
case ST_UNINIT:
printf("ST_UNINIT");
break;
case ST_INIT:
printf("ST_INIT");
break;
case ST_CONNECTED:
printf("ST_CONNECTED");
break;
case ST_MTU_NEGOTIATED:
printf("ST_MTU_NEGOTIATED");
break;
case ST_AUTHENTICATED:
printf("ST_AUTHENTICATED");
break;
case ST_ERROR:
printf("ST_ERROR");
break;
case ST_TERM:
printf("ST_TERM");
break;
default:
printf("unknown state");
break;
}
}
void printEvent(fsmEvName_t ev)
{
switch (ev) {
case EV_UNKNOWN:
printf("EV_UNKNOWN");
break;
case EV_INIT_SUCCESS:
printf("EV_INIT_SUCCESS");
break;
case EV_INIT_FAIL:
printf("EV_INIT_FAIL");
break;
case EV_MASTER_CMD_MSG:
printf("EV_MASTER_CMD_MSG");
break;
case EV_CONNECT_SUCCESS:
printf("EV_CONNECT_SUCCESS");
break;
case EV_CONNECT_FAIL:
printf("EV_CONNECT_FAIL");
break;
case EV_MTU_SUCCESS:
printf("EV_MTU_SUCCESS");
break;
case EV_MTU_FAIL:
printf("EV_MTU_FAIL");
break;
case EV_AUTH_SUCCESS:
printf("EV_AUTH_SUCCESS");
break;
case EV_AUTH_FAIL:
printf("EV_AUTH_FAIL");
break;
case EV_TX_SUCCESS:
printf("EV_TX_SUCCESS");
break;
case EV_TX_FAIL:
printf("EV_TX_FAIL");
break;
case EV_DISCONNECTED:
printf("EV_DISCONNECTED");
break;
case EV_LAST_ENTRY:
printf("EV_LAST_ENTRY");
break;
default:
printf("unknown event");
break;
}
}
Makefile
CXX = gcc
COMPFLAGS = -c -Wall -g
state_machine: state_machine.o
$(CXX) -lrt state_machine.o -o state_machine
state_machine.o: state_machine.c
$(CXX) $(COMPFLAGS) state_machine.c
clean:
rm state_machine state_machine.o