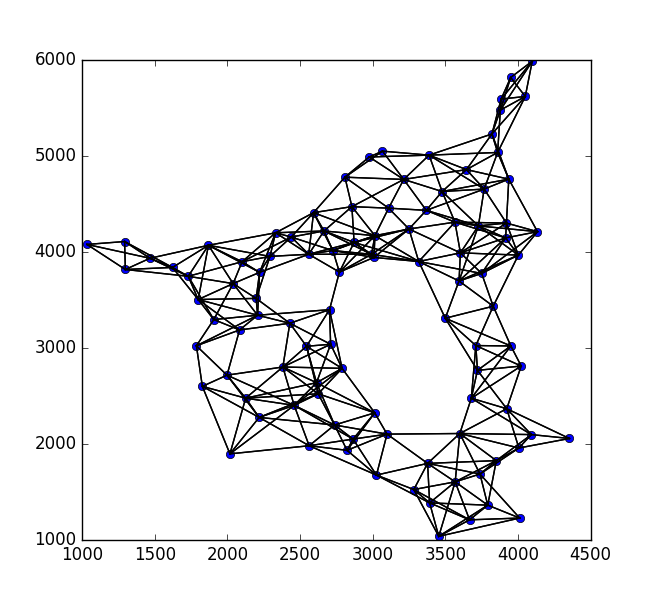
I have a set of points in an example ASCII file showing a 2D image.
 I would like to estimate the total area that these points are filling. There are some places inside this plane that are not filled by any point because these regions have been masked out. What I guess might be practical for estimating the area would be applying a concave hull or alpha shapes.
I tried this approach to find an appropriate
I would like to estimate the total area that these points are filling. There are some places inside this plane that are not filled by any point because these regions have been masked out. What I guess might be practical for estimating the area would be applying a concave hull or alpha shapes.
I tried this approach to find an appropriate alpha value, and consequently estimate the area.
from shapely.ops import cascaded_union, polygonize
import shapely.geometry as geometry
from scipy.spatial import Delaunay
import numpy as np
import pylab as pl
from descartes import PolygonPatch
from matplotlib.collections import LineCollection
def plot_polygon(polygon):
fig = pl.figure(figsize=(10,10))
ax = fig.add_subplot(111)
margin = .3
x_min, y_min, x_max, y_max = polygon.bounds
ax.set_xlim([x_min-margin, x_max+margin])
ax.set_ylim([y_min-margin, y_max+margin])
patch = PolygonPatch(polygon, fc='#999999',
ec='#000000', fill=True,
zorder=-1)
ax.add_patch(patch)
return fig
def alpha_shape(points, alpha):
if len(points) < 4:
# When you have a triangle, there is no sense
# in computing an alpha shape.
return geometry.MultiPoint(list(points)).convex_hull
def add_edge(edges, edge_points, coords, i, j):
"""
Add a line between the i-th and j-th points,
if not in the list already
"""
if (i, j) in edges or (j, i) in edges:
# already added
return
edges.add( (i, j) )
edge_points.append(coords[ [i, j] ])
coords = np.array([point.coords[0]
for point in points])
tri = Delaunay(coords)
edges = set()
edge_points = []
# loop over triangles:
# ia, ib, ic = indices of corner points of the
# triangle
for ia, ib, ic in tri.vertices:
pa = coords[ia]
pb = coords[ib]
pc = coords[ic]
# Lengths of sides of triangle
a = np.sqrt((pa[0]-pb[0])**2 + (pa[1]-pb[1])**2)
b = np.sqrt((pb[0]-pc[0])**2 + (pb[1]-pc[1])**2)
c = np.sqrt((pc[0]-pa[0])**2 + (pc[1]-pa[1])**2)
# Semiperimeter of triangle
s = (a + b + c)/2.0
# Area of triangle by Heron's formula
area = np.sqrt(s*(s-a)*(s-b)*(s-c))
circum_r = a*b*c/(4.0*area)
# Here's the radius filter.
#print circum_r
if circum_r < 1.0/alpha:
add_edge(edges, edge_points, coords, ia, ib)
add_edge(edges, edge_points, coords, ib, ic)
add_edge(edges, edge_points, coords, ic, ia)
m = geometry.MultiLineString(edge_points)
triangles = list(polygonize(m))
return cascaded_union(triangles), edge_points
points=[]
with open("test.asc") as f:
for line in f:
coords=map(float,line.split(" "))
points.append(geometry.shape(geometry.Point(coords[0],coords[1])))
print geometry.Point(coords[0],coords[1])
x = [p.x for p in points]
y = [p.y for p in points]
pl.figure(figsize=(10,10))
point_collection = geometry.MultiPoint(list(points))
point_collection.envelope
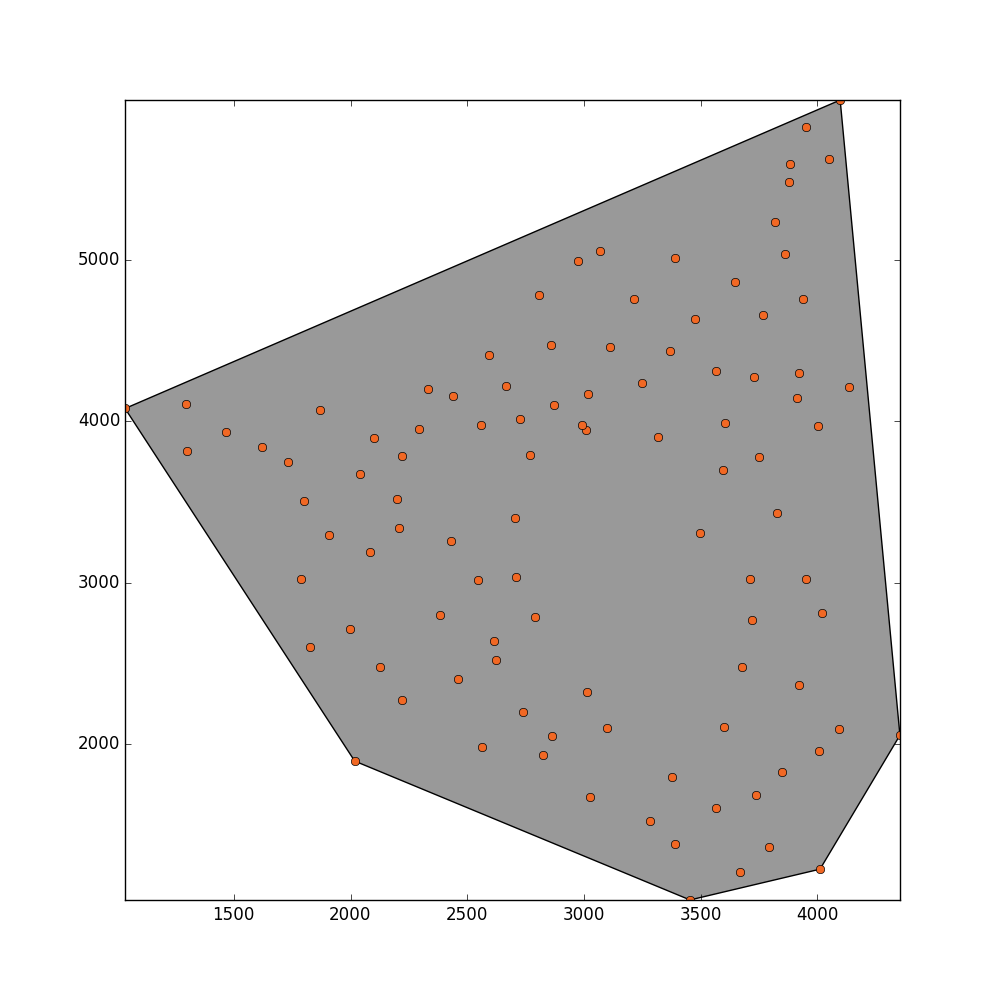
convex_hull_polygon = point_collection.convex_hull
_ = plot_polygon(convex_hull_polygon)
_ = pl.plot(x,y,'o', color='#f16824')
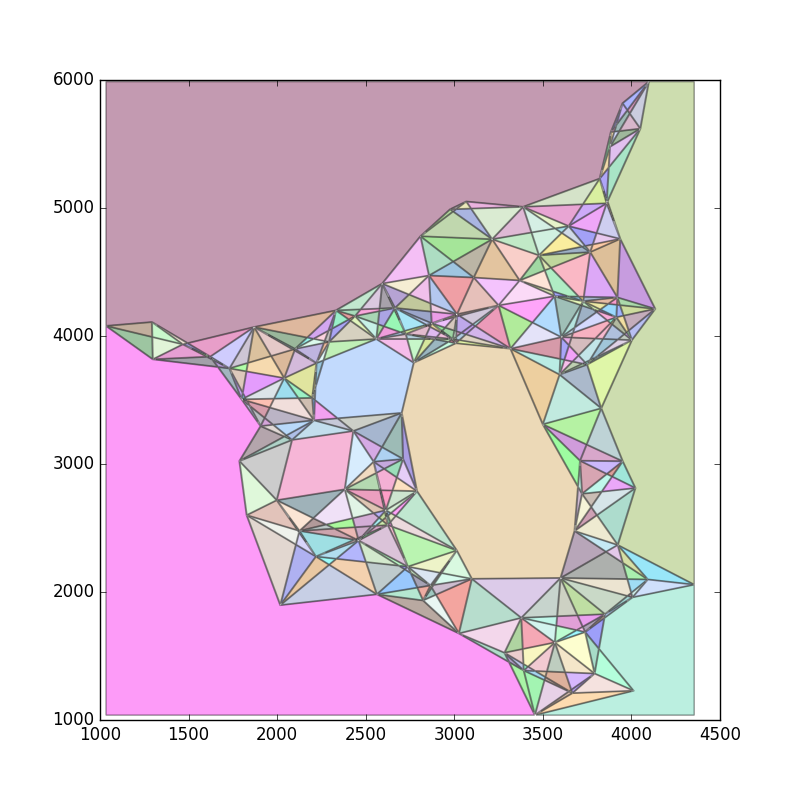
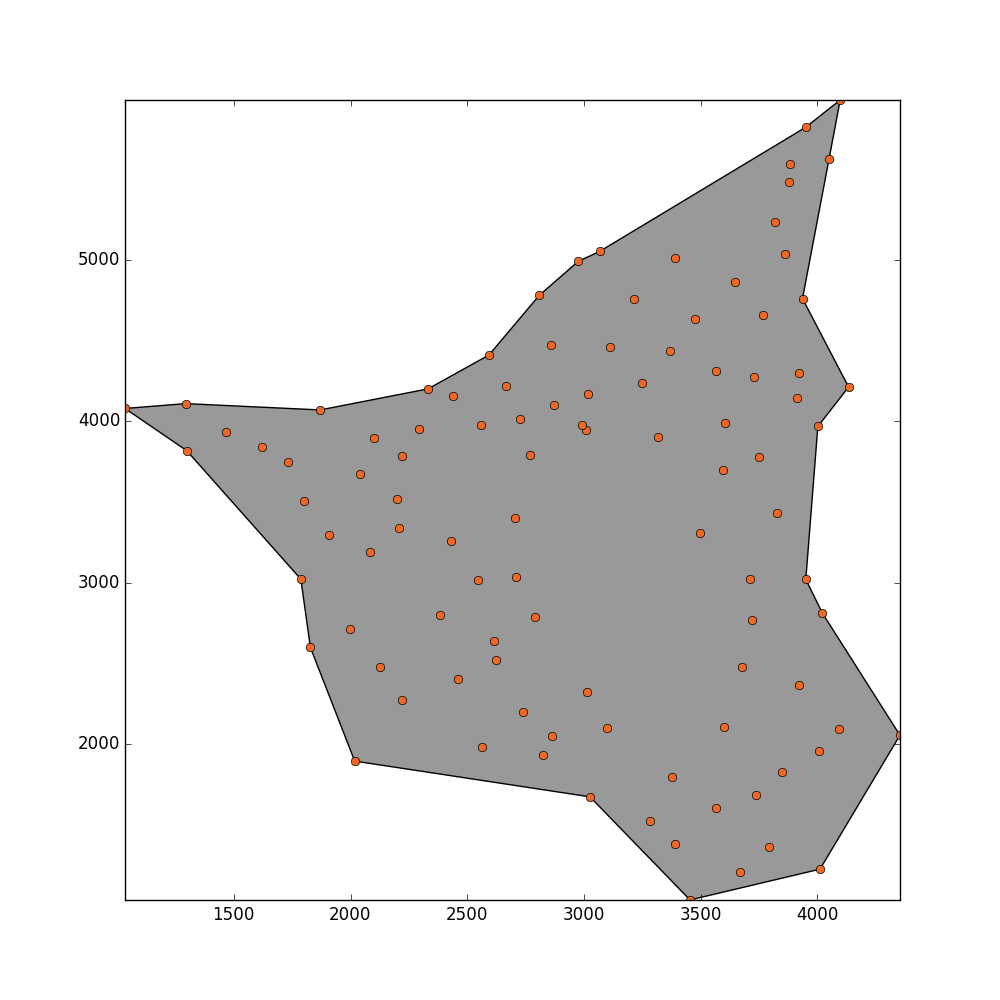
concave_hull, edge_points = alpha_shape(points, alpha=0.001)
lines = LineCollection(edge_points)
_ = plot_polygon(concave_hull)
_ = pl.plot(x,y,'o', color='#f16824')
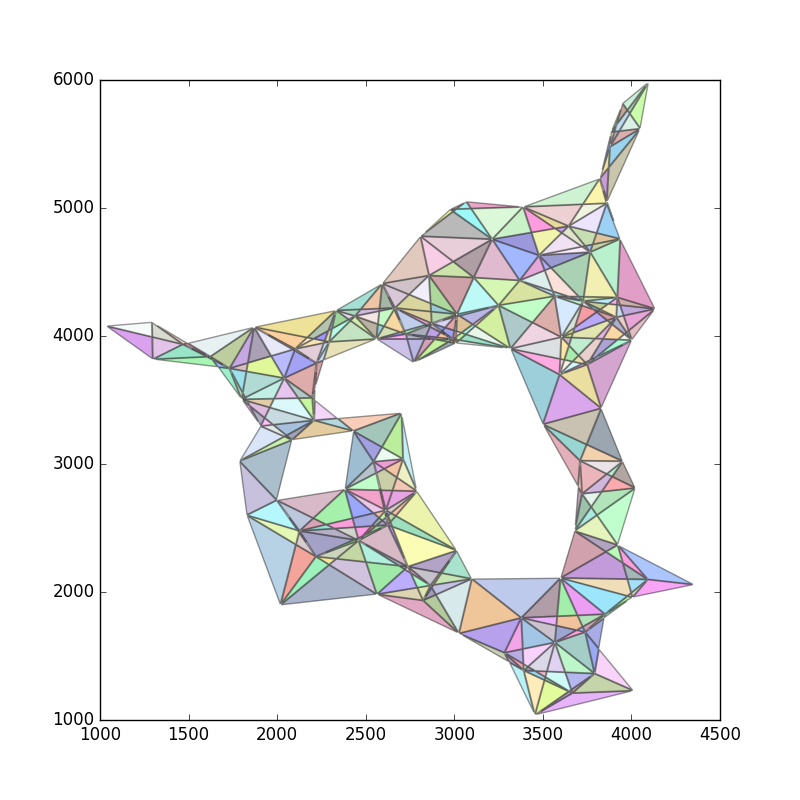
I get this result but I would like that this method could detect the hole in the middle.
Update
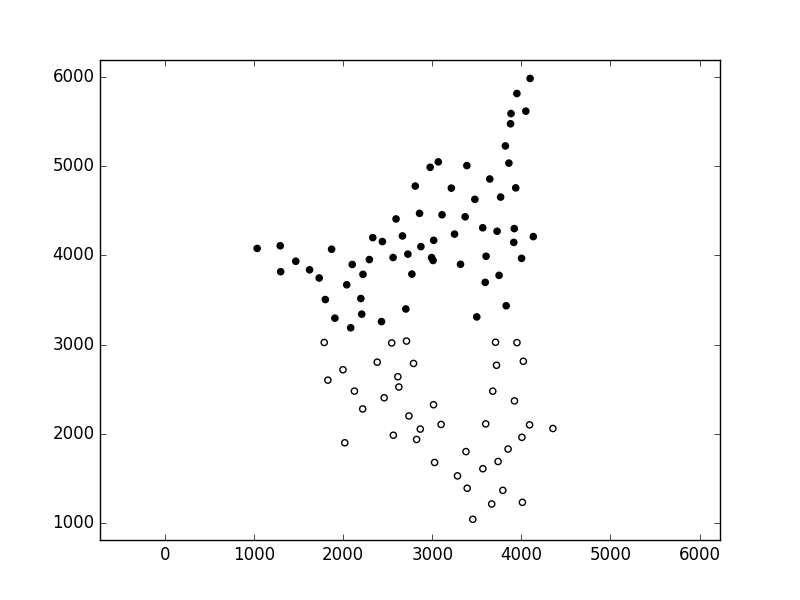
This is how my real data looks like:
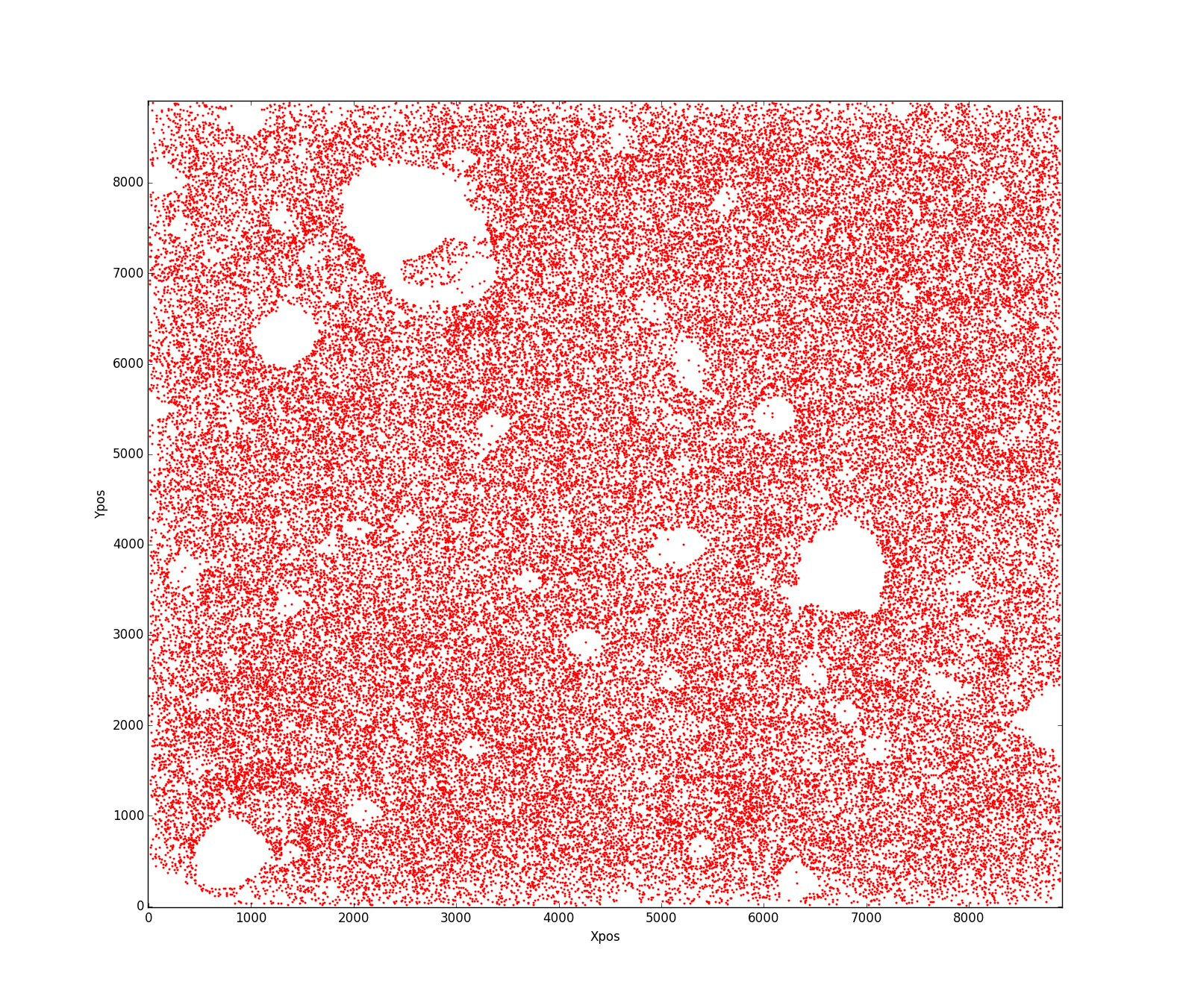
My question is what is the best way to estimate an area of the aforementioned shape? I can not figure out what has gone wrong that this code doesn't work properly?!! Any help will be appreciated.