Foreword
I'm chiming in mostly because I found both the watershed tutorial in the OpenCV documentation (and C++ example) as well as mmgp's answer above to be quite confusing. I revisited a watershed approach multiple times to ultimately give up out of frustration. I finally realized I needed to at least give this approach a try and see it in action. This is what I've come up with after sorting out all of the tutorials I've come across.
Aside from being a computer vision novice, most of my trouble probably had to do with my requirement to use the OpenCVSharp library rather than Python. C# doesn't have baked-in high-power array operators like those found in NumPy (though I realize this has been ported via IronPython), so I struggled quite a bit in both understanding and implementing these operations in C#. Also, for the record, I really despise the nuances of, and inconsistencies in most of these function calls. OpenCVSharp is one of the most fragile libraries I've ever worked with. But hey, it's a port, so what was I expecting? Best of all, though -- it's free.
Without further ado, let's talk about my OpenCVSharp implementation of the watershed, and hopefully clarify some of the stickier points of watershed implementation in general.
Application
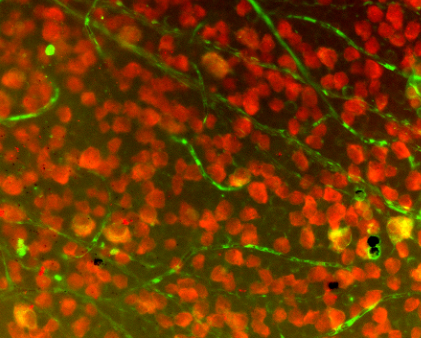
First of all, make sure watershed is what you want and understand its use. I am using stained cell plates, like this one:
![enter image description here]()
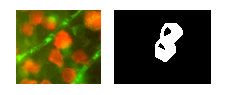
It took me a good while to figure out I couldn't just make one watershed call to differentiate every cell in the field. On the contrary, I first had to isolate a portion of the field, then call watershed on that small portion. I isolated my region of interest (ROI) via a number of filters, which I will explain briefly here:
![enter image description here]()
- Start with source image (left, cropped for demonstration purposes)
- Isolate the red channel (left middle)
- Apply adaptive threshold (right middle)
- Find contours then eliminate those with small areas (right)
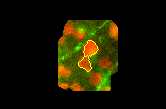
Once we have cleaned the contours resulting from the above thresholding operations, it is time to find candidates for watershed. In my case, I simply iterated through all contours greater than a certain area.
Code
Say we've isolated this contour from the above field as our ROI:
![enter image description here]()
Let's take a look at how we'll code up a watershed.
We'll start with a blank mat and draw only the contour defining our ROI:
var isolatedContour = new Mat(source.Size(), MatType.CV_8UC1, new Scalar(0, 0, 0));
Cv2.DrawContours(isolatedContour, new List<List<Point>> { contour }, -1, new Scalar(255, 255, 255), -1);
In order for the watershed call to work, it will need a couple of "hints" about the ROI. If you're a complete beginner like me, I recommend checking out the CMM watershed page for a quick primer. Suffice to say we're going to create hints about the ROI on the left by creating the shape on the right:
![enter image description here]()
To create the white part (or "background") of this "hint" shape, we'll just Dilate the isolated shape like so:
var kernel = Cv2.GetStructuringElement(MorphShapes.Ellipse, new Size(2, 2));
var background = new Mat();
Cv2.Dilate(isolatedContour, background, kernel, iterations: 8);
To create the black part in the middle (or "foreground"), we'll use a distance transform followed by threshold, which takes us from the shape on the left to the shape on the right:
![enter image description here]()
This takes a few steps, and you may need to play around with the lower bound of your threshold to get results that work for you:
var foreground = new Mat(source.Size(), MatType.CV_8UC1);
Cv2.DistanceTransform(isolatedContour, foreground, DistanceTypes.L2, DistanceMaskSize.Mask5);
Cv2.Normalize(foreground, foreground, 0, 1, NormTypes.MinMax); //Remember to normalize!
foreground.ConvertTo(foreground, MatType.CV_8UC1, 255, 0);
Cv2.Threshold(foreground, foreground, 150, 255, ThresholdTypes.Binary);
Then we'll subtract these two mats to get the final result of our "hint" shape:
var unknown = new Mat(); //this variable is also named "border" in some examples
Cv2.Subtract(background, foreground, unknown);
Again, if we Cv2.ImShow unknown, it would look like this:
![enter image description here]()
Nice! This was easy for me to wrap my head around. The next part, however, got me quite puzzled. Let's look at turning our "hint" into something the Watershed function can use. For this we need to use ConnectedComponents, which is basically a big matrix of pixels grouped by the virtue of their index. For example, if we had a mat with the letters "HI", ConnectedComponents might return this matrix:
0 0 0 0 0 0 0 0 0
0 1 0 1 0 2 2 2 0
0 1 0 1 0 0 2 0 0
0 1 1 1 0 0 2 0 0
0 1 0 1 0 0 2 0 0
0 1 0 1 0 2 2 2 0
0 0 0 0 0 0 0 0 0
So, 0 is the background, 1 is the letter "H", and 2 is the letter "I". (If you get to this point and want to visualize your matrix, I recommend checking out this instructive answer.) Now, here's how we'll utilize ConnectedComponents to create the markers (or labels) for watershed:
var labels = new Mat(); //also called "markers" in some examples
Cv2.ConnectedComponents(foreground, labels);
labels = labels + 1;
//this is a much more verbose port of numpy's: labels[unknown==255] = 0
for (int x = 0; x < labels.Width; x++)
{
for (int y = 0; y < labels.Height; y++)
{
//You may be able to just send "int" in rather than "char" here:
var labelPixel = (int)labels.At<char>(y, x); //note: x and y are inexplicably
var borderPixel = (int)unknown.At<char>(y, x); //and infuriatingly reversed
if (borderPixel == 255)
labels.Set(y, x, 0);
}
}
Note that the Watershed function requires the border area to be marked by 0. So, we've set any border pixels to 0 in the label/marker array.
At this point, we should be all set to call Watershed. However, in my particular application, it is useful just to visualize a small portion of the entire source image during this call. This may be optional for you, but I first just mask off a small bit of the source by dilating it:
var mask = new Mat();
Cv2.Dilate(isolatedContour, mask, new Mat(), iterations: 20);
var sourceCrop = new Mat(source.Size(), source.Type(), new Scalar(0, 0, 0));
source.CopyTo(sourceCrop, mask);
And then make the magic call:
Cv2.Watershed(sourceCrop, labels);
Results
The above Watershed call will modify labels in place. You'll have to go back to remembering about the matrix resulting from ConnectedComponents. The difference here is, if watershed found any dams between watersheds, they will be marked as "-1" in that matrix. Like the ConnectedComponents result, different watersheds will be marked in a similar fashion of incrementing numbers. For my purposes, I wanted to store these into separate contours, so I created this loop to split them up:
var watershedContours = new List<Tuple<int, List<Point>>>();
for (int x = 0; x < labels.Width; x++)
{
for (int y = 0; y < labels.Height; y++)
{
var labelPixel = labels.At<Int32>(y, x); //note: x, y switched
var connected = watershedContours.Where(t => t.Item1 == labelPixel).FirstOrDefault();
if (connected == null)
{
connected = new Tuple<int, List<Point>>(labelPixel, new List<Point>());
watershedContours.Add(connected);
}
connected.Item2.Add(new Point(x, y));
if (labelPixel == -1)
sourceCrop.Set(y, x, new Vec3b(0, 255, 255));
}
}
Then, I wanted to print these contours with random colors, so I created the following mat:
var watershed = new Mat(source.Size(), MatType.CV_8UC3, new Scalar(0, 0, 0));
foreach (var component in watershedContours)
{
if (component.Item2.Count < (labels.Width * labels.Height) / 4 && component.Item1 >= 0)
{
var color = GetRandomColor();
foreach (var point in component.Item2)
watershed.Set(point.Y, point.X, color);
}
}
Which yields the following when shown:
![enter image description here]()
If we draw on the source image the dams that were marked by a -1 earlier, we get this:
![enter image description here]()
Edits:
I forgot to note: make sure you're cleaning up your mats after you're done with them. They WILL stay in memory and OpenCVSharp may present with some unintelligible error message. I should really be using using above, but mat.Release() is an option as well.
Also, mmgp's answer above includes this line: dt = ((dt - dt.min()) / (dt.max() - dt.min()) * 255).astype(numpy.uint8), which is a histogram stretching step applied to the results of the distance transform. I omitted this step for a number of reasons (mostly because I didn't think the histograms I saw were too narrow to begin with), but your mileage may vary.