Note: Many of the constructs already exist in one form or another, here I'm showing you how to do it from scratch.
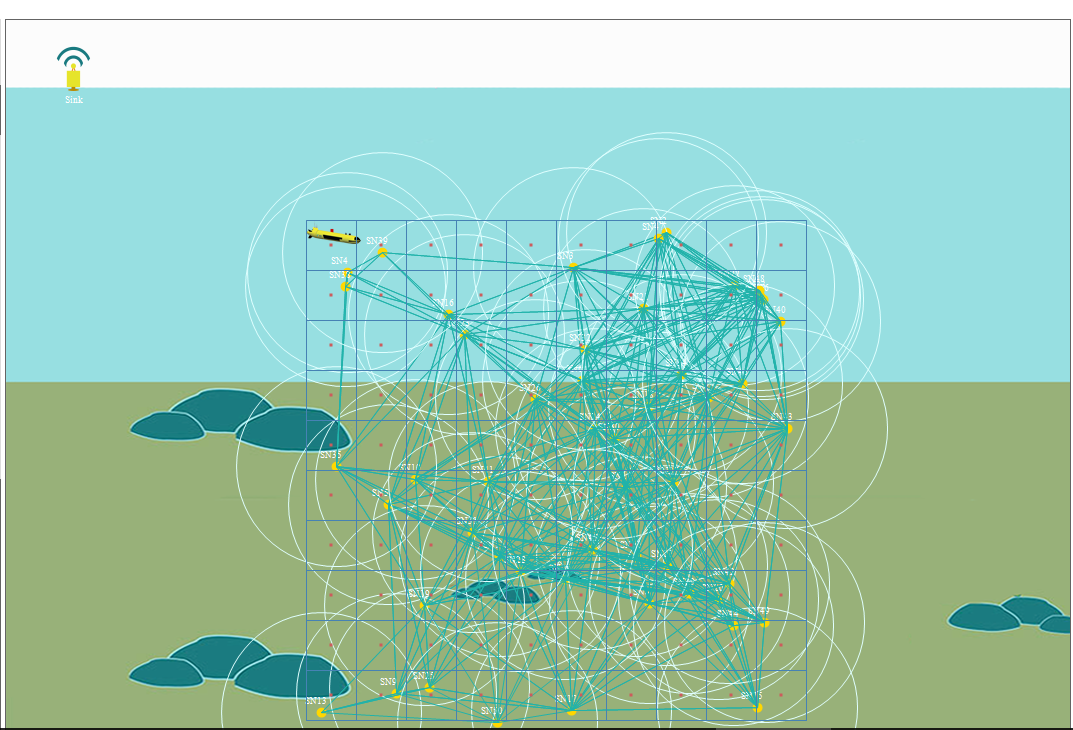
![enter image description here]() Same control, same data, different perspective
Same control, same data, different perspective
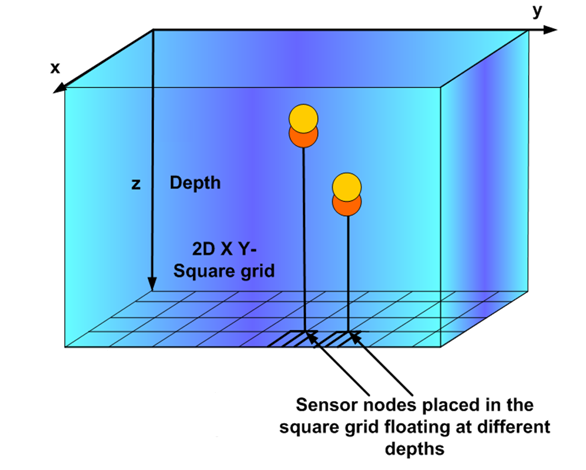
Since your data is 3-dimensional, you need store your positional data 3-dimensional so you don't have to calculate everything by hand every time you change the perspective:
[TypeConverter(typeof(ExpandableObjectConverter))]
public struct Point3D
{
public int X { get; set; }
public int Y { get; set; }
public int Z { get; set; }
public Point3D(int x, int y, int z)
{
X = x;
Y = y;
Z = z;
}
}
To project these 3D-points to screen coordinates (2D) you need some kind of projection/camera system. Usually you would do this with Matrix/Vector math, but for this example the following orthographic approach will suffice.
The perspective handles the transformation from 3D to 2D. Depending on the parameters your graphic will skew/roatate/translate etc.
[TypeConverter(typeof(ExpandableObjectConverter))]
public class Perspective
{
public float X_shift { get; set; } = 0.0f;
public float Y_shift { get; set; } = 0.0f;
public float X_x { get; set; } = 1.0f;
public float X_y { get; set; } = 0.0f;
public float X_z { get; set; } = 0.0f;
public float Y_x { get; set; } = 0.0f;
public float Y_y { get; set; } = 1.0f;
public float Y_z { get; set; } = 0.0f;
public PointF Project(Point3D p)
{
return new PointF(X_shift + X_x * p.X + X_y * p.Y + X_z * p.Z, Y_shift + Y_x * p.X + Y_y * p.Y + Y_z * p.Z);
}
}
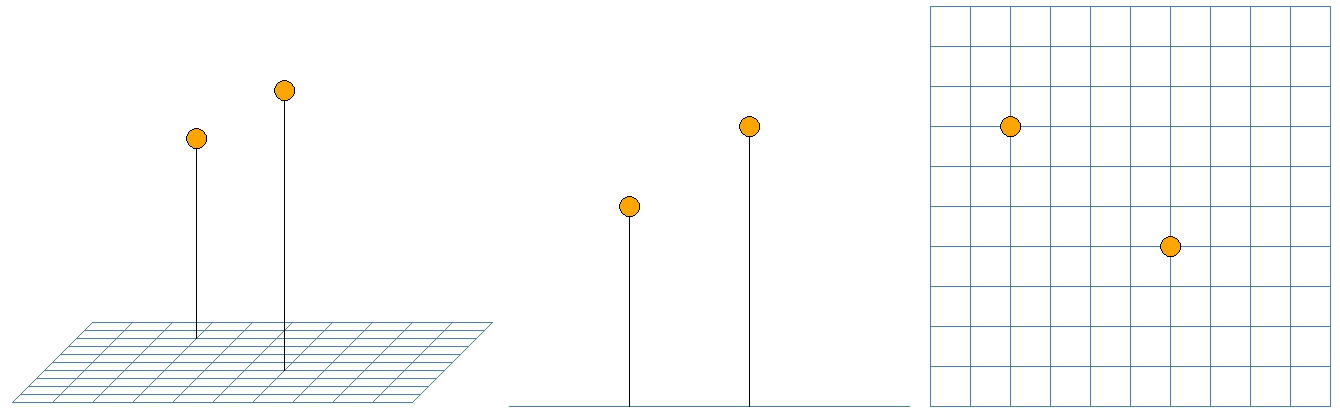
All you need to do now, is draw everything as usual, but with 3D-coordinates translated to 2D. The following control draws a grid (at depth 400) and two sensors.
using System.Drawing;
using System.Windows.Forms;
namespace WindowsFormsApp1
{
public class PerspectiveGrid : Control
{
private Perspective _perspective;
public Perspective Perspective
{
get { return _perspective; }
set
{
_perspective = value;
Invalidate();
}
}
public PerspectiveGrid()
{
Perspective = new Perspective
{
X_shift = 100,
Y_shift = 10,
X_x = -0.2f,
X_y = 1.0f,
X_z = 0.0f,
Y_x = 0.2f,
Y_y = 0.0f,
Y_z = 1.0f,
};
}
/// <summary>
/// Paints a Grid at Z = 400 and two Sensors
/// </summary>
protected override void OnPaint(PaintEventArgs e)
{
DrawGrid(10,40,400,e.Graphics);
DrawSensor(new Point3D(80, 120, 400), new Point3D(80, 120, 200), e.Graphics);
DrawSensor(new Point3D(240, 240, 400), new Point3D(240, 240, 120), e.Graphics);
}
/// <summary>
/// Draws a sensor at the specified position(s)
/// </summary>
private void DrawSensor(Point3D from, Point3D to, Graphics gr)
{
DrawLine(gr, Pens.Black, from, to);
DrawSphere(gr, Pens.Black, Brushes.Orange, to, 6);
}
/// <summary>
/// Draws a sphere as a Circle at the specified position
/// </summary>
private void DrawSphere(Graphics gr, Pen outline, Brush fill, Point3D center, float radius)
{
PointF center2D = Project(center);
gr.FillEllipse(fill, center2D.X - radius, center2D.Y - radius, radius * 2, radius * 2);
gr.DrawEllipse(outline, center2D.X - radius, center2D.Y - radius, radius * 2, radius * 2);
}
/// <summary>
/// Draws the grid at the specified depth
/// </summary>
private void DrawGrid(int numOfCells, int cellSize, int depth, Graphics gr)
{
Pen p = Pens.SteelBlue;
for (int i = 0; i <= numOfCells; i++)
{
// Vertical
DrawLine(gr, p, new Point3D(i * cellSize, 0 , depth), new Point3D(i * cellSize, numOfCells * cellSize, depth));
// Horizontal
DrawLine(gr, p, new Point3D(0, i * cellSize, depth), new Point3D(numOfCells * cellSize, i * cellSize, depth));
}
}
/// <summary>
/// Draws a line from one 3DPoint to another
/// </summary>
private void DrawLine(Graphics graphics, Pen pen, Point3D p1, Point3D p2)
{
PointF pointFrom = Project(p1);
PointF pointTo = Project(p2);
graphics.DrawLine(pen, pointFrom, pointTo);
}
/// <summary>
/// Projects a Point3D to a PointF
/// </summary>
private PointF Project(Point3D p)
{
return Perspective.Project(p);
}
}
}
A couple of links that might help you build on these concepts:
Orthographic projection
Quaternion
Math Library with Matrix and Vector support
{kind=link}
{kind=link}