How do I save a trained model in PyTorch? I have read that:
torch.save()/torch.load()is for saving/loading a serializable object.model.state_dict()/model.load_state_dict()is for saving/loading model state.
How do I save a trained model in PyTorch? I have read that:
torch.save()/torch.load() is for saving/loading a serializable object.model.state_dict()/model.load_state_dict() is for saving/loading model state.Found this page on their github repo:
Recommended approach for saving a model
There are two main approaches for serializing and restoring a model.
The first (recommended) saves and loads only the model parameters:
torch.save(the_model.state_dict(), PATH)Then later:
the_model = TheModelClass(*args, **kwargs) the_model.load_state_dict(torch.load(PATH))The second saves and loads the entire model:
torch.save(the_model, PATH)Then later:
the_model = torch.load(PATH)However in this case, the serialized data is bound to the specific classes and the exact directory structure used, so it can break in various ways when used in other projects, or after some serious refactors.
See also: Save and Load the Model section from the official PyTorch tutorials.
nn.Sequential model. Do you know how to do that? I don't have a model class definition. –
Rodin IndexError: index out of range in self when running this: predictions = model(batch.textt).squeeze(1) –
Cleocleobulus torch.save(model.state_dict(), filepath)? –
Dissatisfaction It depends on what you want to do.
Case # 1: Save the model to use it yourself for inference: You save the model, you restore it, and then you change the model to evaluation mode. This is done because you usually have BatchNorm and Dropout layers that by default are in train mode on construction:
torch.save(model.state_dict(), filepath)
#Later to restore:
model.load_state_dict(torch.load(filepath))
model.eval()
Case # 2: Save model to resume training later: If you need to keep training the model that you are about to save, you need to save more than just the model. You also need to save the state of the optimizer, epochs, score, etc. You would do it like this:
state = {
'epoch': epoch,
'state_dict': model.state_dict(),
'optimizer': optimizer.state_dict(),
...
}
torch.save(state, filepath)
To resume training you would do things like: state = torch.load(filepath), and then, to restore the state of each individual object, something like this:
model.load_state_dict(state['state_dict'])
optimizer.load_state_dict(state['optimizer'])
Since you are resuming training, DO NOT call model.eval() once you restore the states when loading.
Case # 3: Model to be used by someone else with no access to your code:
In Tensorflow you can create a .pb file that defines both the architecture and the weights of the model. This is very handy, specially when using Tensorflow serve. The equivalent way to do this in Pytorch would be:
torch.save(model, filepath)
# Then later:
model = torch.load(filepath)
This way is still not bullet proof and since pytorch is still undergoing a lot of changes, I wouldn't recommend it.
torch.load returns just an OrderedDict. How do you get the model in order to make predictions? –
Gangling The pickle Python library implements binary protocols for serializing and de-serializing a Python object.
When you import torch (or when you use PyTorch) it will import pickle for you and you don't need to call pickle.dump() and pickle.load() directly, which are the methods to save and to load the object.
In fact, torch.save() and torch.load() will wrap pickle.dump() and pickle.load() for you.
A state_dict the other answer mentioned deserves just a few more notes.
What state_dict do we have inside PyTorch?
There are actually two state_dicts.
The PyTorch model is torch.nn.Module which has model.parameters() call to get learnable parameters (w and b).
These learnable parameters, once randomly set, will update over time as we learn.
Learnable parameters are the first state_dict.
The second state_dict is the optimizer state dict. You recall that the optimizer is used to improve our learnable parameters. But the optimizer state_dict is fixed. Nothing to learn there.
Because state_dict objects are Python dictionaries, they can be easily saved, updated, altered, and restored, adding a great deal of modularity to PyTorch models and optimizers.
Let's create a super simple model to explain this:
import torch
import torch.optim as optim
model = torch.nn.Linear(5, 2)
# Initialize optimizer
optimizer = optim.SGD(model.parameters(), lr=0.001, momentum=0.9)
print("Model's state_dict:")
for param_tensor in model.state_dict():
print(param_tensor, "\t", model.state_dict()[param_tensor].size())
print("Model weight:")
print(model.weight)
print("Model bias:")
print(model.bias)
print("---")
print("Optimizer's state_dict:")
for var_name in optimizer.state_dict():
print(var_name, "\t", optimizer.state_dict()[var_name])
This code will output the following:
Model's state_dict:
weight torch.Size([2, 5])
bias torch.Size([2])
Model weight:
Parameter containing:
tensor([[ 0.1328, 0.1360, 0.1553, -0.1838, -0.0316],
[ 0.0479, 0.1760, 0.1712, 0.2244, 0.1408]], requires_grad=True)
Model bias:
Parameter containing:
tensor([ 0.4112, -0.0733], requires_grad=True)
---
Optimizer's state_dict:
state {}
param_groups [{'lr': 0.001, 'momentum': 0.9, 'dampening': 0, 'weight_decay': 0, 'nesterov': False, 'params': [140695321443856, 140695321443928]}]
Note this is a minimal model. You may try to add stack of sequential
model = torch.nn.Sequential(
torch.nn.Linear(D_in, H),
torch.nn.Conv2d(A, B, C)
torch.nn.Linear(H, D_out),
)
Note that only layers with learnable parameters (convolutional layers, linear layers, etc.) and registered buffers (batchnorm layers) have entries in the model's state_dict.
Non-learnable things belong to the optimizer object state_dict, which contains information about the optimizer's state, as well as the hyperparameters used.
The rest of the story is the same; in the inference phase (this is a phase when we use the model after training) for predicting; we do predict based on the parameters we learned. So for the inference, we just need to save the parameters model.state_dict().
torch.save(model.state_dict(), filepath)
And to use later model.load_state_dict(torch.load(filepath)) model.eval()
Note: Don't forget the last line model.eval() this is crucial after loading the model.
Also don't try to save torch.save(model.parameters(), filepath). The model.parameters() is just the generator object.
On the other hand, torch.save(model, filepath) saves the model object itself, but keep in mind the model doesn't have the optimizer's state_dict. Check the other excellent answer by @Jadiel de Armas to save the optimizer's state dict.
model.load_state_dict, what is the model? If I'm exporting it to another environment, what would be the code sample to export and then import my model? I'm training a Bert. not sure what class to use to then load these parameters into –
Unessential A common PyTorch convention is to save models using either a .pt or .pth file extension.
Save/Load Entire Model
Save:
path = "username/directory/lstmmodelgpu.pth"
torch.save(trainer, path)
Load:
(Model class must be defined somewhere)
model.load_state_dict(torch.load(PATH))
model.eval()
If you want to save the model and wants to resume the training later:
Single GPU: Save:
state = {
'epoch': epoch,
'state_dict': model.state_dict(),
'optimizer': optimizer.state_dict(),
}
savepath='checkpoint.t7'
torch.save(state,savepath)
Load:
checkpoint = torch.load('checkpoint.t7')
model.load_state_dict(checkpoint['state_dict'])
optimizer.load_state_dict(checkpoint['optimizer'])
epoch = checkpoint['epoch']
Multiple GPU: Save
state = {
'epoch': epoch,
'state_dict': model.module.state_dict(),
'optimizer': optimizer.state_dict(),
}
savepath='checkpoint.t7'
torch.save(state,savepath)
Load:
checkpoint = torch.load('checkpoint.t7')
model.load_state_dict(checkpoint['state_dict'])
optimizer.load_state_dict(checkpoint['optimizer'])
epoch = checkpoint['epoch']
#Don't call DataParallel before loading the model otherwise you will get an error
model = nn.DataParallel(model) #ignore the line if you want to load on Single GPU
How you save your model depends on how you want to access it in the future. If you can call a new instance of the model class, then all you need to do is save/load the weights of the model with model.state_dict():
# Save:
torch.save(old_model.state_dict(), PATH)
# Load:
new_model = TheModelClass(*args, **kwargs)
new_model.load_state_dict(torch.load(PATH))
If you cannot for whatever reason (or prefer the simpler syntax), then you can save the entire model (actually a reference to the file(s) defining the model, along with its state_dict) with torch.save():
# Save:
torch.save(old_model, PATH)
# Load:
new_model = torch.load(PATH)
But since this is a reference to the location of the files defining the model class, this code is not portable unless those files are also ported in the same directory structure.
If you wish your model to be portable, you can easily allow it to be imported with torch.hub. If you add an appropriately defined hubconf.py file to a github repo, this can be easily called from within PyTorch to enable users to load your model with/without weights:
hubconf.py (github.com/repo_owner/repo_name)
dependencies = ['torch']
from my_module import mymodel as _mymodel
def mymodel(pretrained=False, **kwargs):
return _mymodel(pretrained=pretrained, **kwargs)
Loading model:
new_model = torch.hub.load('repo_owner/repo_name', 'mymodel')
new_model_pretrained = torch.hub.load('repo_owner/repo_name', 'mymodel', pretrained=True)
pip install pytorch-lightning
make sure your parent model uses pl.LightningModule instead of nn.Module
Saving and loading checkpoints using pytorch lightning
import pytorch_lightning as pl
model = MyLightningModule(hparams)
trainer.fit(model)
trainer.save_checkpoint("example.ckpt")
new_model = MyModel.load_from_checkpoint(checkpoint_path="example.ckpt")
I use this approach, hope it will be useful for you.
num_labels = len(test_label_cols)
robertaclassificationtrain = '/dbfs/FileStore/tables/PM/TC/roberta_model'
robertaclassificationpath = "/dbfs/FileStore/tables/PM/TC/ROBERTACLASSIFICATION"
model = RobertaForSequenceClassification.from_pretrained(robertaclassificationpath,
num_labels=num_labels)
model.cuda()
model.load_state_dict(torch.load(robertaclassificationtrain))
model.eval()
Where I save my train model already in 'roberta_model' path. Save a train model.
torch.save(model.state_dict(), '/dbfs/FileStore/tables/PM/TC/roberta_model')
Export/Load Model in TorchScript Format is another way of saving model
Another common way to do inference with a trained model is to use TorchScript, an intermediate representation of a PyTorch model that can be run in Python as well as in C++.
NOTE: Using the TorchScript format, you will be able to load the exported model and run inference without defining the model class.
class TheModelClass(nn.Module):
def __init__(self):
super(TheModelClass, self).__init__()
self.conv1 = nn.Conv2d(3, 6, 5)
self.pool = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(6, 16, 5)
self.fc1 = nn.Linear(16 * 5 * 5, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
def forward(self, x):
x = self.pool(F.relu(self.conv1(x)))
x = self.pool(F.relu(self.conv2(x)))
x = x.view(-1, 16 * 5 * 5)
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
# Initialize model
model = TheModelClass()
Export:
model_scripted = torch.jit.script(model) # Export to TorchScript
model_scripted.save('model_scripted.pt') # Save
Load [ Works w/o defining model class ]:
model = torch.jit.load('model_scripted.pt')
model.eval()
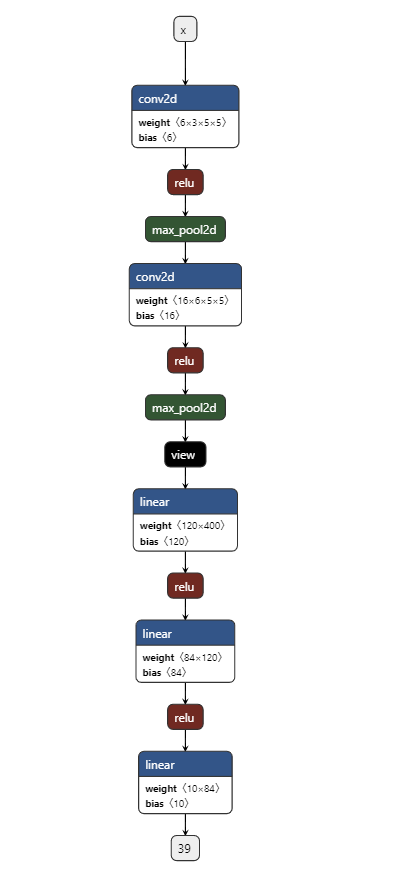
**Model arch in Netron looks like this**
These days everything is written in the official tutorial: https://pytorch.org/tutorials/beginner/saving_loading_models.html
You have several options on how to save and what to save and all is explained in that tutorial.
save:
torch.save(model, file_path)
load:
model_save = torch.load(file_path)
Note:
© 2022 - 2024 — McMap. All rights reserved.
torch.save(model, f)andtorch.save(model.state_dict(), f). The saved files have the same size. Now I am confused. Also, I found using pickle to save model.state_dict() extremely slow. I think the best way is to usetorch.save(model.state_dict(), f)since you handle the creation of the model, and torch handles the loading of the model weights, thus eliminating possible issues. Reference: discuss.pytorch.org/t/saving-torch-models/838/4 – Nnwpickle? – Rodinnn.Sequential model. Do you know how to do that? I don't have a model class definition. For sequential I wrote this, hopefully a reputable answerer will confirm: #62923552 – Rodin