I want to export object from 3ds max to my C++/DirectX application and I have an problem with orientation exporting.
3ds max uses right-handed Z-up coordinate system and my application makes use of left-handed Y-up coordinate system. I use {x, y, z, w} notation of components in this whole question.
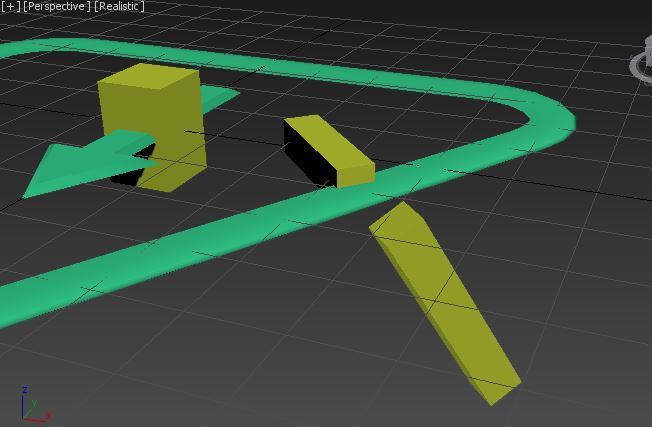
I have 3 bones (or any other hierarchical objects) in 3ds max:
To export their orientation I use MaxScript:
if hasParent then
localOrientation = boneNode.transform.rotationPart * inverse boneNode.parent.transform.rotationPart
else
localOrientation = boneNode.transform.rotationPart
I save this localOrientation to file:
BoneRoot no_parent 0.707107 0.0 0.0 0.707107 //stands for (-90, 0, 0) Euler rotation in 3ds max UI
Bone001 BoneRoot 0.0 -0.382683 0.0 0.92388 //local orientation (parent space)
Bone002 Bone001 -0.353553 -0.612372 0.353553 -0.612372
I've read that despite 3ds max sing right-handed coordinate system, it uses left-handed system for transform.rotationPart.
My question is, how to now convert the local rotation from that file to my application? Maybe I should apply some conversion to root bone only? I have tried apply this to each bone orientation:
Quaternion convertFrom3dsMax(const Quaternion &input) {
auto q = input;
//swap Y and Z
auto temp = q.getZ();
q.setZ(q.getY());
q.setY(temp);
//invert
//q.setX(-q.getX());
q.setY(-q.getY());
q.setZ(-q.getZ());
q.setW(-q.getW());
return q;
}
And many other combinations of swaping axes, inverting arguments and even leaving everything as is. But each and every way my imported file bones are oriented in a wrong way.
Additional information (if needed):
My 3ds max scene looks like this:
And my application (for the convertFrom3dsMax function I presented; don't focus on mesh which is just an helper, look at lines that represent bones):
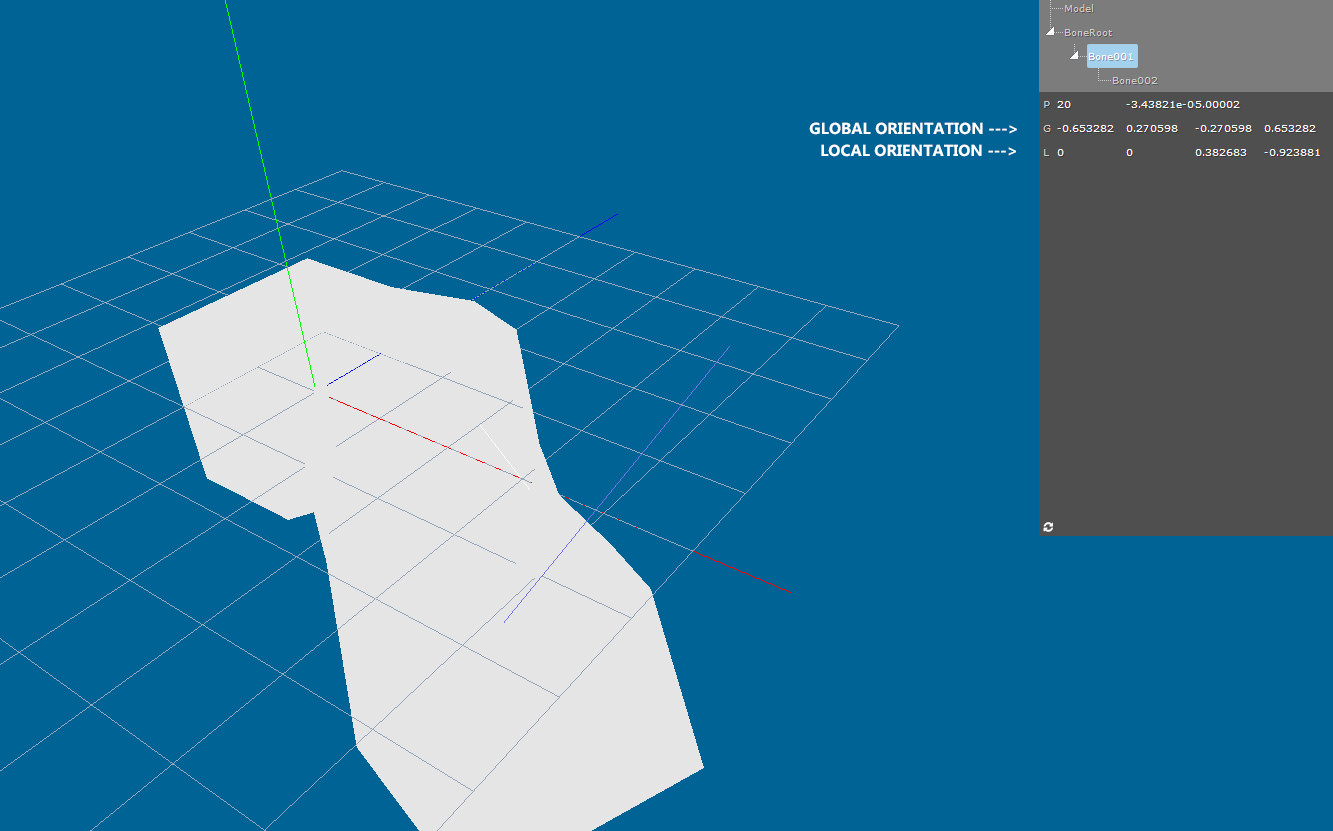 (for example, but not only, the last bone is going "up" instead of "down")
(for example, but not only, the last bone is going "up" instead of "down")
When I don't apply anything to loaded Quaterions in my convertFrom3dsMax the scene looks this way:
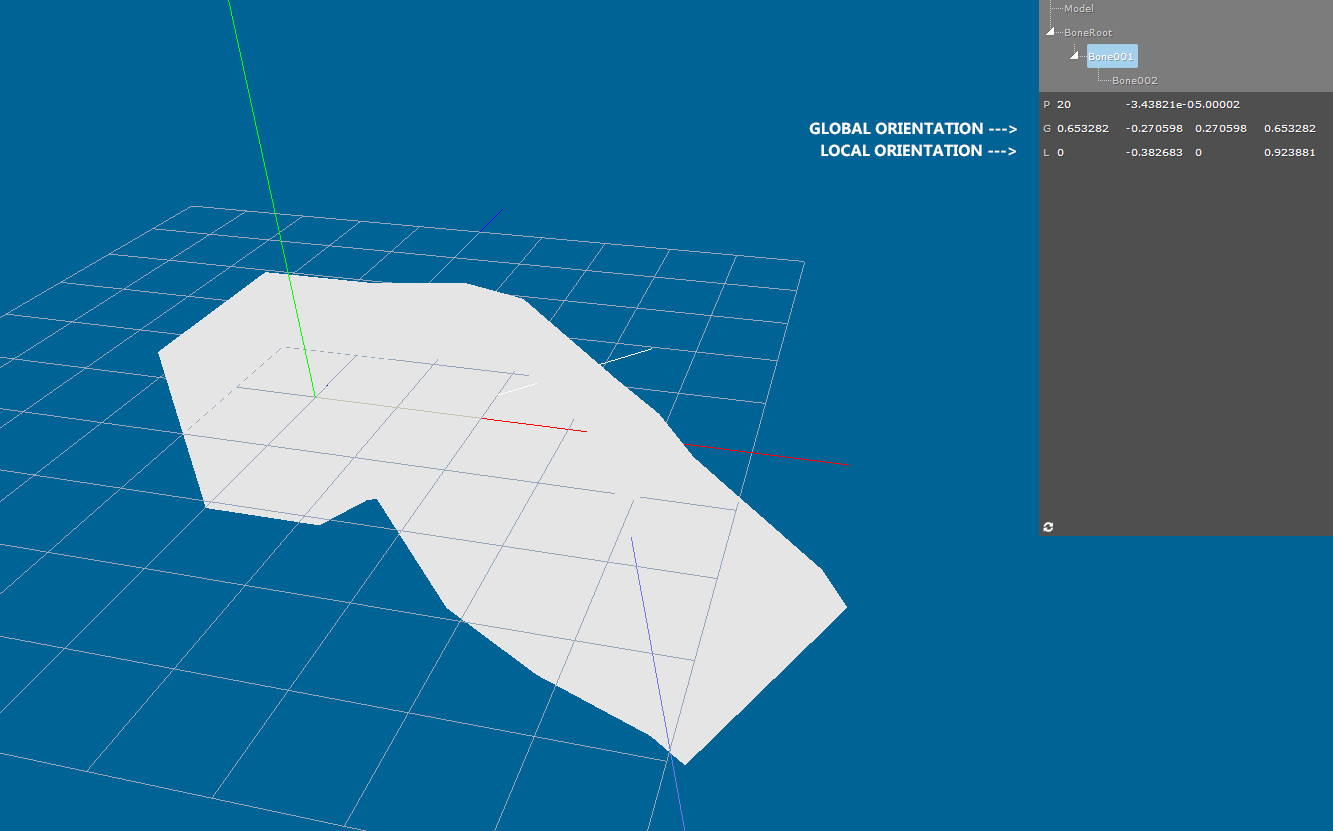 (for example, but not only, the middle bone is going "from" instead of "to" the screen)
(for example, but not only, the middle bone is going "from" instead of "to" the screen)
Note that I use left-handed operations for DirectX in my application (e.g. XMMatrixLookAtLH(...)) and I treat Y as "up".
Rotation matrix in application:
DirectX::XMMATRIX rotationMatrix = DirectX::XMMatrixRotationQuaternion(
DirectX::XMVectorSet(
object->global.getX(),
object->global.getY(),
object->global.getZ(),
object->global.getW()
)
);
And the global orientation is calculated this way: global = local * parent->global where local is loaded for each bone from file (with a help from convertFrom3dsMax) and operator* is defined as:
Quaternion operator* (const Quaternion by) const {
//"R" for result
float wR = w * by.getW() - x * by.getX() - y * by.getY() - z * by.getZ();
float xR = x * by.getW() + w * by.getX() + y * by.getZ() - z * by.getY();
float yR = y * by.getW() + w * by.getY() + z * by.getX() - x * by.getZ();
float zR = z * by.getW() + w * by.getZ() + x * by.getY() - y * by.getX();
return Quaternion(xR, yR, zR, wR);
}
I highly consider the convertFrom3dsMax as the source of my problems (and not the Quaternion math or DirectX calls inside of application).
For position, which is not that tricky as orientation I use boneNode.transform.pos and:
Point3D convertFrom3dsMax(const Point3D &input) {
auto result = input;
//swap Y and Z
auto tempZ = result.getZ();
result.setZ(result.getY());
result.setY(tempZ);
return result;
}
which looks just right (the starting position of each line/Bone is ok, position of un-rotated helper mesh vertices are ok).
object.transform.rotationPart. My problem is about converting quaternion from 3ds max coordinate system to mine. The matrices vs quaternions is a bit off-topic, let's just say quaternions have strong advantages, especially in fields of bones and interpolation. And yes, 3ds max does use RHS but (as I mentioned in question) thetransform.rotationPartwhich stores the orientation (as quaternion) seems to be in LHS (despite 3ds max UI uses RHS). – Calomel