This approach works only on points. You don't need to create masks for this.
The main idea is:
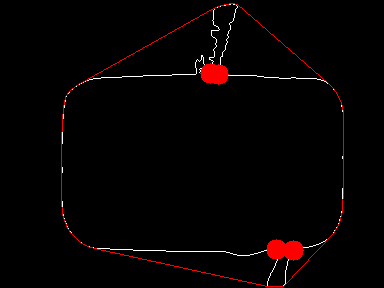
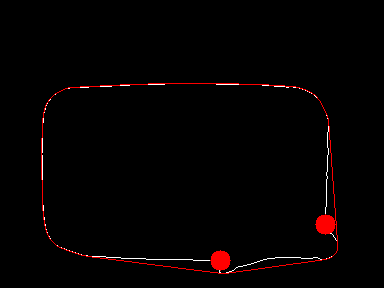
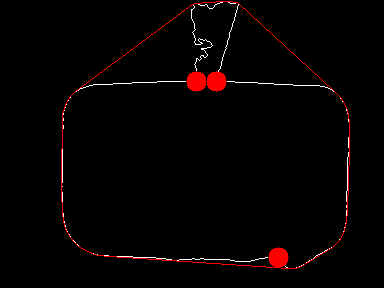
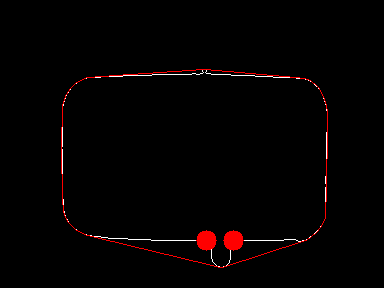
- Find defects on contour
- If I find at least two defects, find the two closest defects
- Remove from the contour the points between the two closest defects
- Restart from 1 on the new contour
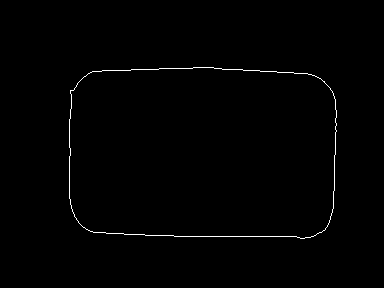
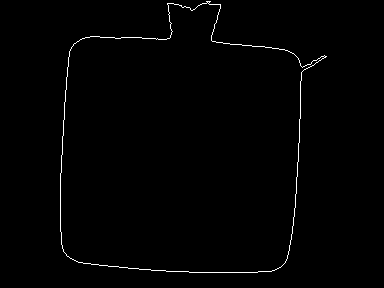
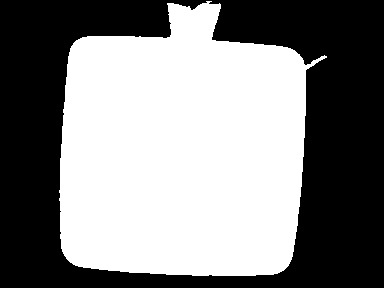
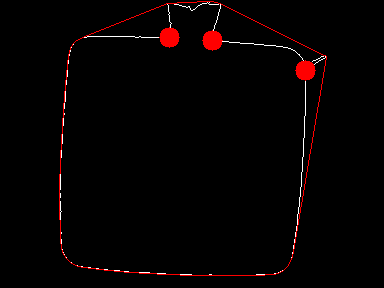
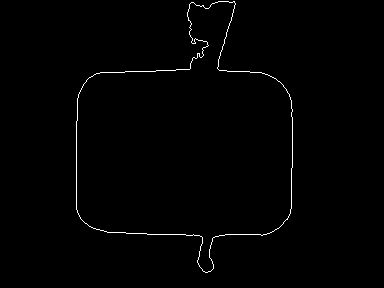
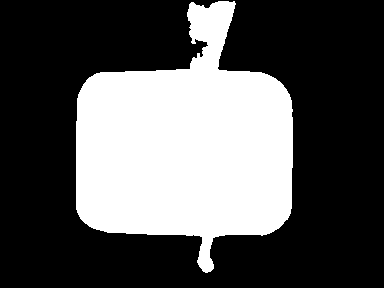
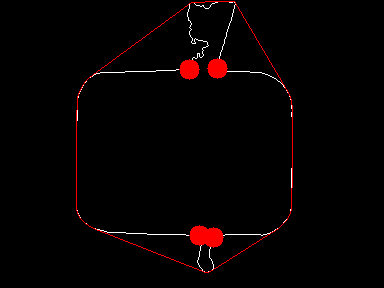
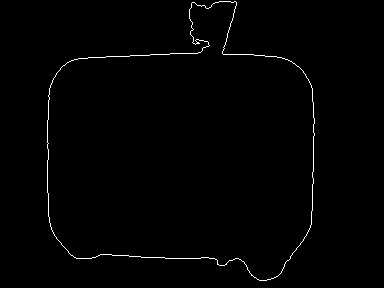
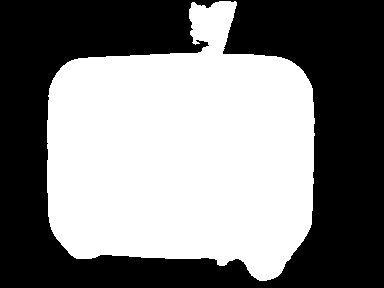
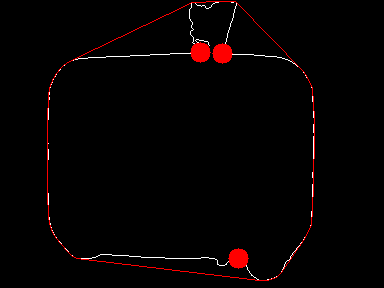
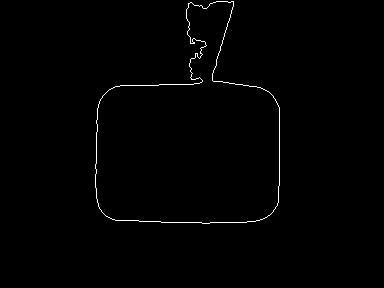
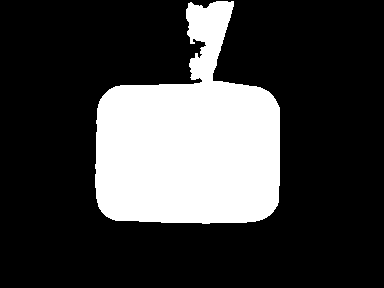
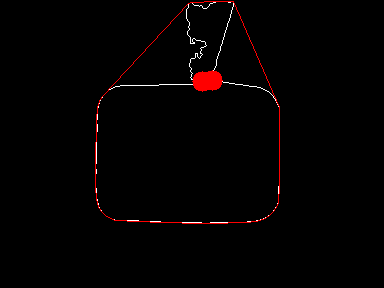
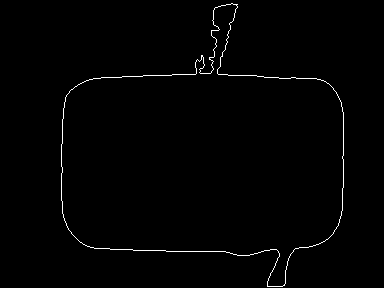
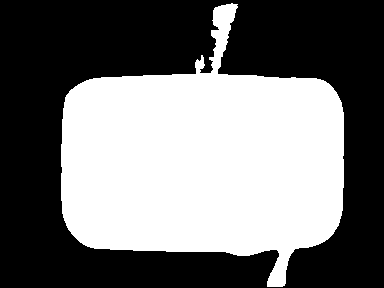
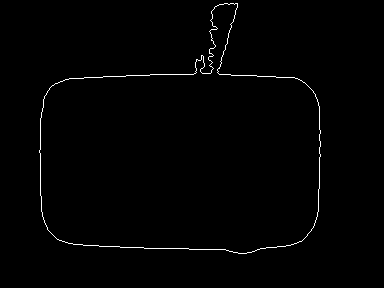
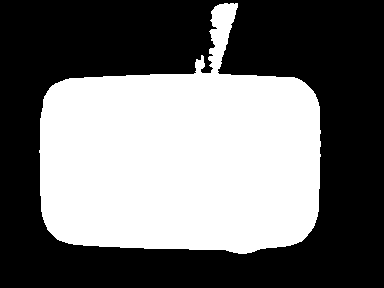
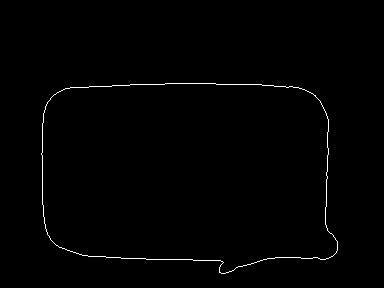
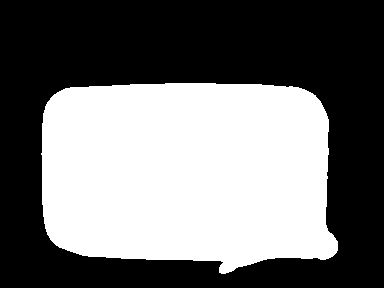
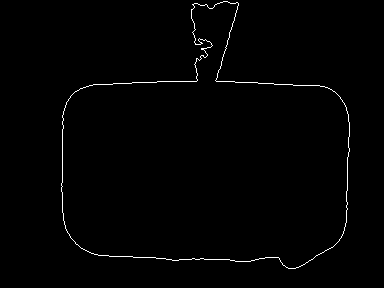
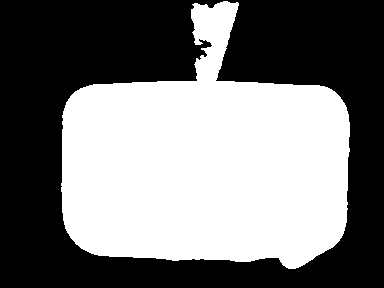
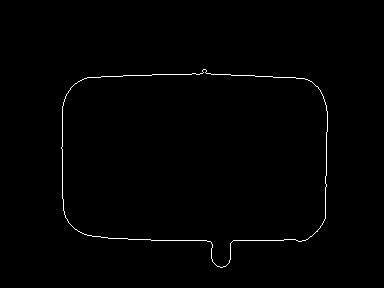
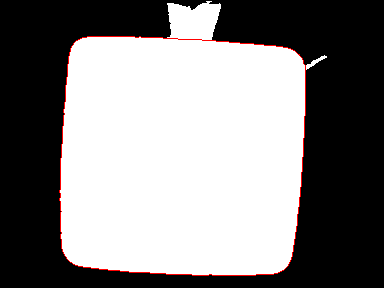
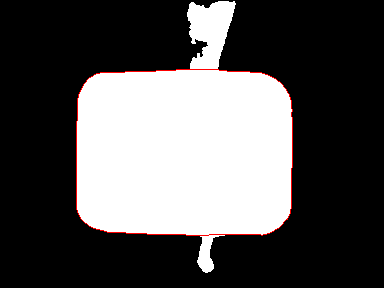
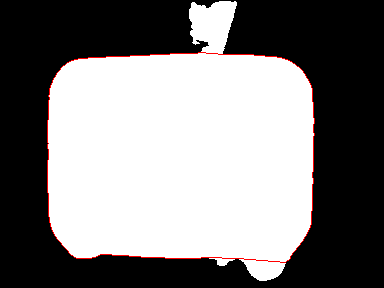
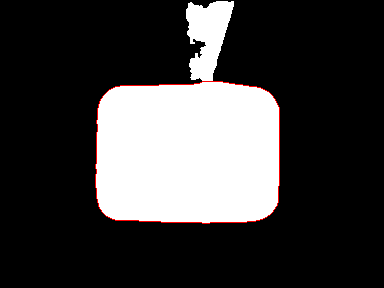
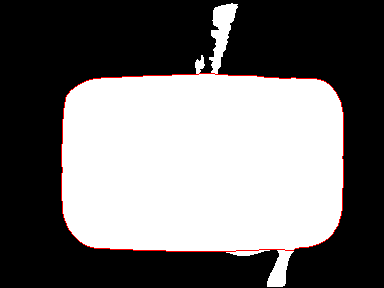
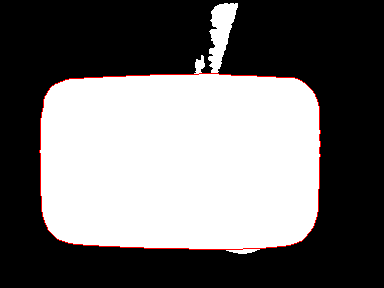
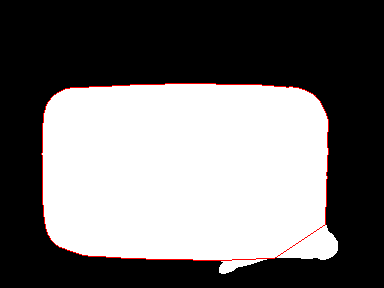
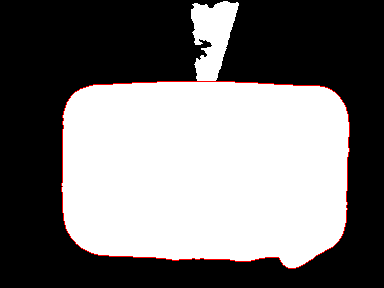
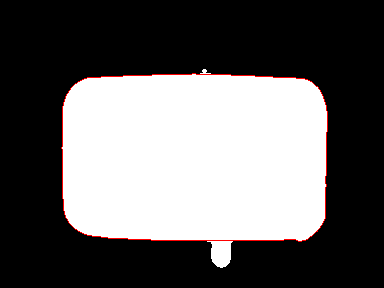
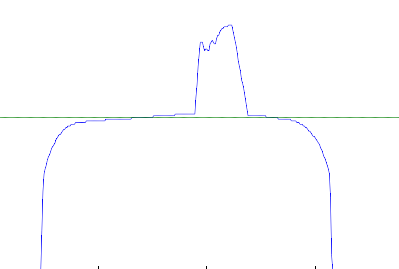
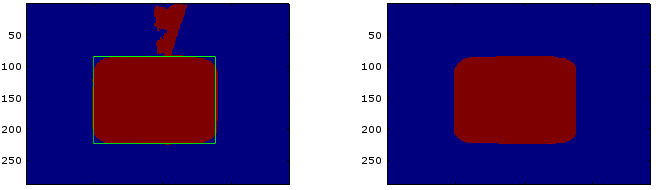
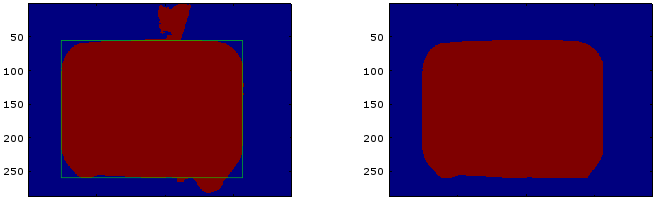
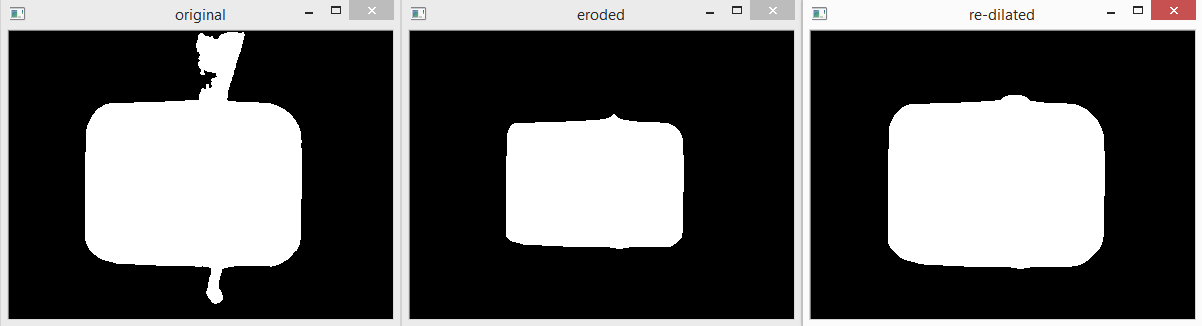
I get the following results. As you can see, it has some drawbacks for smooth defects (e.g. 7th image), but works pretty good for clearly visible defects. I don't know if this will solve your problem, but can be a starting point. In practice should be quite fast (you can surely optimize the code below, specially the removeFromContour function). Also, the only parameter of this approach is the amount of the convexity defect, so it works well with both small and big defecting blobs.
![enter image description here]()
![enter image description here]()
![enter image description here]()
![enter image description here]()
![enter image description here]()
![enter image description here]()
![enter image description here]()
![enter image description here]()
![enter image description here]()
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
int ed2(const Point& lhs, const Point& rhs)
{
return (lhs.x - rhs.x)*(lhs.x - rhs.x) + (lhs.y - rhs.y)*(lhs.y - rhs.y);
}
vector<Point> removeFromContour(const vector<Point>& contour, const vector<int>& defectsIdx)
{
int minDist = INT_MAX;
int startIdx;
int endIdx;
// Find nearest defects
for (int i = 0; i < defectsIdx.size(); ++i)
{
for (int j = i + 1; j < defectsIdx.size(); ++j)
{
float dist = ed2(contour[defectsIdx[i]], contour[defectsIdx[j]]);
if (minDist > dist)
{
minDist = dist;
startIdx = defectsIdx[i];
endIdx = defectsIdx[j];
}
}
}
// Check if intervals are swapped
if (startIdx <= endIdx)
{
int len1 = endIdx - startIdx;
int len2 = contour.size() - endIdx + startIdx;
if (len2 < len1)
{
swap(startIdx, endIdx);
}
}
else
{
int len1 = startIdx - endIdx;
int len2 = contour.size() - startIdx + endIdx;
if (len1 < len2)
{
swap(startIdx, endIdx);
}
}
// Remove unwanted points
vector<Point> out;
if (startIdx <= endIdx)
{
out.insert(out.end(), contour.begin(), contour.begin() + startIdx);
out.insert(out.end(), contour.begin() + endIdx, contour.end());
}
else
{
out.insert(out.end(), contour.begin() + endIdx, contour.begin() + startIdx);
}
return out;
}
int main()
{
Mat1b img = imread("path_to_mask", IMREAD_GRAYSCALE);
Mat3b out;
cvtColor(img, out, COLOR_GRAY2BGR);
vector<vector<Point>> contours;
findContours(img.clone(), contours, RETR_EXTERNAL, CHAIN_APPROX_NONE);
vector<Point> pts = contours[0];
vector<int> hullIdx;
convexHull(pts, hullIdx, false);
vector<Vec4i> defects;
convexityDefects(pts, hullIdx, defects);
while (true)
{
// For debug
Mat3b dbg;
cvtColor(img, dbg, COLOR_GRAY2BGR);
vector<vector<Point>> tmp = {pts};
drawContours(dbg, tmp, 0, Scalar(255, 127, 0));
vector<int> defectsIdx;
for (const Vec4i& v : defects)
{
float depth = float(v[3]) / 256.f;
if (depth > 2) // filter defects by depth
{
// Defect found
defectsIdx.push_back(v[2]);
int startidx = v[0]; Point ptStart(pts[startidx]);
int endidx = v[1]; Point ptEnd(pts[endidx]);
int faridx = v[2]; Point ptFar(pts[faridx]);
line(dbg, ptStart, ptEnd, Scalar(255, 0, 0), 1);
line(dbg, ptStart, ptFar, Scalar(0, 255, 0), 1);
line(dbg, ptEnd, ptFar, Scalar(0, 0, 255), 1);
circle(dbg, ptFar, 4, Scalar(127, 127, 255), 2);
}
}
if (defectsIdx.size() < 2)
{
break;
}
// If I have more than two defects, remove the points between the two nearest defects
pts = removeFromContour(pts, defectsIdx);
convexHull(pts, hullIdx, false);
convexityDefects(pts, hullIdx, defects);
}
// Draw result contour
vector<vector<Point>> tmp = { pts };
drawContours(out, tmp, 0, Scalar(0, 0, 255), 1);
imshow("Result", out);
waitKey();
return 0;
}
UPDATE
Working on an approximated contour (e.g. using CHAIN_APPROX_SIMPLE in findContours) may be faster, but the length of contours must be computed using arcLength().
This is the snippet to replace in the swapping part of removeFromContour:
// Check if intervals are swapped
if (startIdx <= endIdx)
{
//int len11 = endIdx - startIdx;
vector<Point> inside(contour.begin() + startIdx, contour.begin() + endIdx);
int len1 = (inside.empty()) ? 0 : arcLength(inside, false);
//int len22 = contour.size() - endIdx + startIdx;
vector<Point> outside1(contour.begin(), contour.begin() + startIdx);
vector<Point> outside2(contour.begin() + endIdx, contour.end());
int len2 = (outside1.empty() ? 0 : arcLength(outside1, false)) + (outside2.empty() ? 0 : arcLength(outside2, false));
if (len2 < len1)
{
swap(startIdx, endIdx);
}
}
else
{
//int len1 = startIdx - endIdx;
vector<Point> inside(contour.begin() + endIdx, contour.begin() + startIdx);
int len1 = (inside.empty()) ? 0 : arcLength(inside, false);
//int len2 = contour.size() - startIdx + endIdx;
vector<Point> outside1(contour.begin(), contour.begin() + endIdx);
vector<Point> outside2(contour.begin() + startIdx, contour.end());
int len2 = (outside1.empty() ? 0 : arcLength(outside1, false)) + (outside2.empty() ? 0 : arcLength(outside2, false));
if (len1 < len2)
{
swap(startIdx, endIdx);
}
}
 or
or 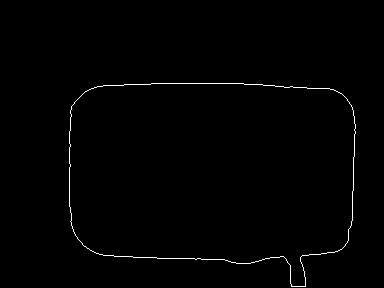 for example.
for example.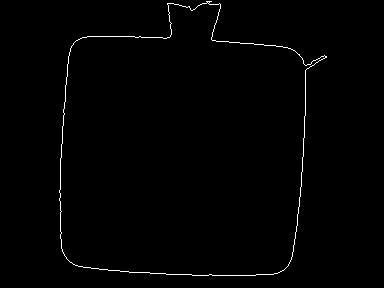


convexityDefects? docs.opencv.org/2.4/modules/imgproc/doc/… – Conover