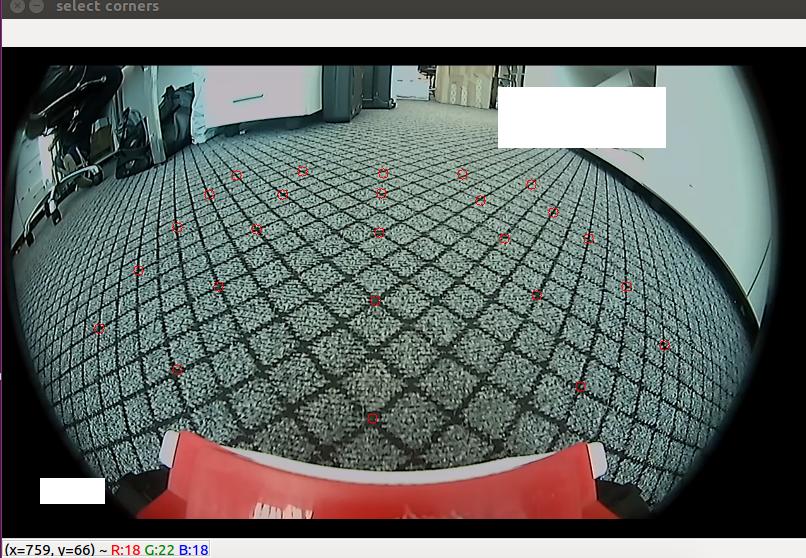
I am trying to calibrate a camera with a fisheye lens. I therefor used the fisheye lens module, but keep getting strange results no matter what distortion parameters I fix. This is the input image I use: https://i.sstatic.net/abE5g.jpg
{kind=link}
where the red circles indicate the corners I use to calibrate my camera.
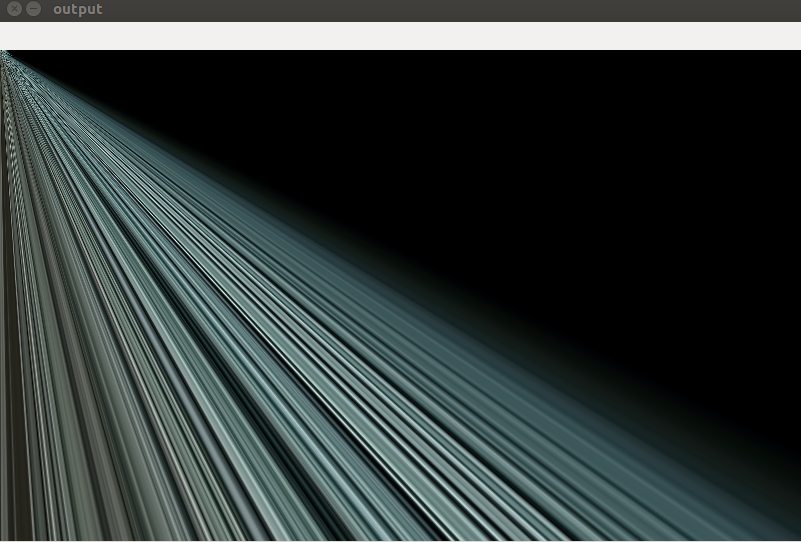
This is the best I could get, output: https://i.sstatic.net/DV4fn.jpg
{kind=link}
I currently don't know by heart what the camera sensor dimensions are, but based on the focal length in pixels that is being calculated in my nitrinsic matrix, I deduce my sensor size is approximately 3.3mm (assuming my physical focal length is 1.8mm), which seems realistic to me. Yet, when undistorting my input image I get nonsense. Could someone tell me what I may be doing incorrectly?
the matrices and rms being output by the calibration:
K:[263.7291703200009, 0, 395.1618975493187;
0, 144.3800397321767, 188.9308218101271;
0, 0, 1]
D:[0, 0, 0, 0]
rms: 9.27628
my code:
#include <opencv2/opencv.hpp>
#include "opencv2/core.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/ccalib/omnidir.hpp"
using namespace std;
using namespace cv;
vector<vector<Point2d> > points2D;
vector<vector<Point3d> > objectPoints;
Mat src;
//so that I don't have to select them manually every time
void initializePoints2D()
{
points2D[0].push_back(Point2d(234, 128));
points2D[0].push_back(Point2d(300, 124));
points2D[0].push_back(Point2d(381, 126));
points2D[0].push_back(Point2d(460, 127));
points2D[0].push_back(Point2d(529, 137));
points2D[0].push_back(Point2d(207, 147));
points2D[0].push_back(Point2d(280, 147));
points2D[0].push_back(Point2d(379, 146));
points2D[0].push_back(Point2d(478, 153));
points2D[0].push_back(Point2d(551, 165));
points2D[0].push_back(Point2d(175, 180));
points2D[0].push_back(Point2d(254, 182));
points2D[0].push_back(Point2d(377, 185));
points2D[0].push_back(Point2d(502, 191));
points2D[0].push_back(Point2d(586, 191));
points2D[0].push_back(Point2d(136, 223));
points2D[0].push_back(Point2d(216, 239));
points2D[0].push_back(Point2d(373, 253));
points2D[0].push_back(Point2d(534, 248));
points2D[0].push_back(Point2d(624, 239));
points2D[0].push_back(Point2d(97, 281));
points2D[0].push_back(Point2d(175, 322));
points2D[0].push_back(Point2d(370, 371));
points2D[0].push_back(Point2d(578, 339));
points2D[0].push_back(Point2d(662, 298));
for(int j=0; j<25;j++)
{
circle(src, points2D[0].at(j), 5, Scalar(0, 0, 255), 1, 8, 0);
}
imshow("src with circles", src);
waitKey(0);
}
int main(int argc, char** argv)
{
Mat srcSaved;
src = imread("images/frontCar.png");
resize(src, src, Size(), 0.5, 0.5);
src.copyTo(srcSaved);
vector<Point3d> objectPointsRow;
vector<Point2d> points2DRow;
objectPoints.push_back(objectPointsRow);
points2D.push_back(points2DRow);
for(int i=0; i<5;i++)
{
for(int j=0; j<5;j++)
{
objectPoints[0].push_back(Point3d(5*j,5*i,1));
}
}
initializePoints2D();
cv::Matx33d K;
cv::Vec4d D;
std::vector<cv::Vec3d> rvec;
std::vector<cv::Vec3d> tvec;
int flag = 0;
flag |= cv::fisheye::CALIB_RECOMPUTE_EXTRINSIC;
flag |= cv::fisheye::CALIB_CHECK_COND;
flag |= cv::fisheye::CALIB_FIX_SKEW;
flag |= cv::fisheye::CALIB_FIX_K1;
flag |= cv::fisheye::CALIB_FIX_K2;
flag |= cv::fisheye::CALIB_FIX_K3;
flag |= cv::fisheye::CALIB_FIX_K4;
double rms =cv::fisheye::calibrate(
objectPoints, points2D, src.size(),
K, D, rvec, tvec, flag, cv::TermCriteria(3, 20, 1e-6)
);
Mat output;
cerr<<"K:"<<K<<endl;
cerr<<"D:"<<D<<endl;
cv::fisheye::undistortImage(srcSaved, output, K, D);
cerr<<"rms: "<<rms<<endl;
imshow("output", output);
waitKey(0);
cerr<<"image .size: "<<srcSaved.size()<<endl;
}
If anybody has an idea, feel free to either share some code in Python either in C++. Whatever floats your boat.
EDIT:
As you may have notice I don't use a black and white checkerboard for the calibration, but corners from tiles constituting my carpet. At the end of the day the goal -I think- is to get corner coordinates which represent samples from the distortion radii . The carpet is to some extent the same as the checkerboard, the only difference -once again I think- is the fact that you have less high frequency edges at those eg corners on the carpet than on a black and white checkerboard.
I know the number of pictures is very limited, ie only 1. I expect the image to be undistorted to some extent, but I also expect the undistortion to be very well done. But in this case the image output looks like total nonsense.
I ended up using this image with a chessboard: https://i.sstatic.net/XWTKJ.jpg provided by this website: https://sites.google.com/site/scarabotix/ocamcalib-toolbox/ocamcalib-toolbox-download-page But results are still very poor: diagonal lines like the other output image I posted.
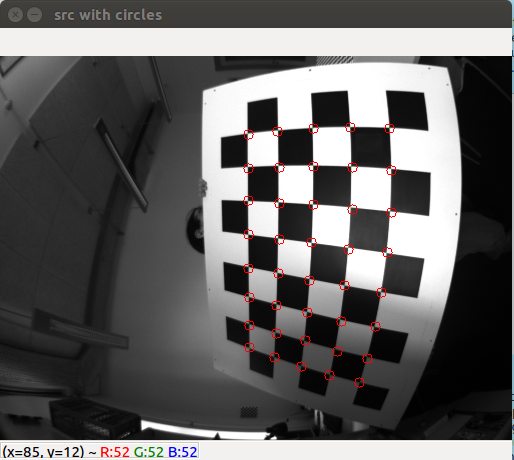{kind=link}
Thanks