I made an update from an existing project optimised for real-time video.
The code work for python 3.7 and the associate opencv librairie.
![enter image description here]()
def icp(a, b,
max_time = 1
):
import cv2
import numpy
import copy
import pylab
import time
import sys
import sklearn.neighbors
import scipy.optimize
def res(p,src,dst):
T = numpy.matrix([[numpy.cos(p[2]),-numpy.sin(p[2]),p[0]],
[numpy.sin(p[2]), numpy.cos(p[2]),p[1]],
[0 ,0 ,1 ]])
n = numpy.size(src,0)
xt = numpy.ones([n,3])
xt[:,:-1] = src
xt = (xt*T.T).A
d = numpy.zeros(numpy.shape(src))
d[:,0] = xt[:,0]-dst[:,0]
d[:,1] = xt[:,1]-dst[:,1]
r = numpy.sum(numpy.square(d[:,0])+numpy.square(d[:,1]))
return r
def jac(p,src,dst):
T = numpy.matrix([[numpy.cos(p[2]),-numpy.sin(p[2]),p[0]],
[numpy.sin(p[2]), numpy.cos(p[2]),p[1]],
[0 ,0 ,1 ]])
n = numpy.size(src,0)
xt = numpy.ones([n,3])
xt[:,:-1] = src
xt = (xt*T.T).A
d = numpy.zeros(numpy.shape(src))
d[:,0] = xt[:,0]-dst[:,0]
d[:,1] = xt[:,1]-dst[:,1]
dUdth_R = numpy.matrix([[-numpy.sin(p[2]),-numpy.cos(p[2])],
[ numpy.cos(p[2]),-numpy.sin(p[2])]])
dUdth = (src*dUdth_R.T).A
g = numpy.array([ numpy.sum(2*d[:,0]),
numpy.sum(2*d[:,1]),
numpy.sum(2*(d[:,0]*dUdth[:,0]+d[:,1]*dUdth[:,1])) ])
return g
def hess(p,src,dst):
n = numpy.size(src,0)
T = numpy.matrix([[numpy.cos(p[2]),-numpy.sin(p[2]),p[0]],
[numpy.sin(p[2]), numpy.cos(p[2]),p[1]],
[0 ,0 ,1 ]])
n = numpy.size(src,0)
xt = numpy.ones([n,3])
xt[:,:-1] = src
xt = (xt*T.T).A
d = numpy.zeros(numpy.shape(src))
d[:,0] = xt[:,0]-dst[:,0]
d[:,1] = xt[:,1]-dst[:,1]
dUdth_R = numpy.matrix([[-numpy.sin(p[2]),-numpy.cos(p[2])],[numpy.cos(p[2]),-numpy.sin(p[2])]])
dUdth = (src*dUdth_R.T).A
H = numpy.zeros([3,3])
H[0,0] = n*2
H[0,2] = numpy.sum(2*dUdth[:,0])
H[1,1] = n*2
H[1,2] = numpy.sum(2*dUdth[:,1])
H[2,0] = H[0,2]
H[2,1] = H[1,2]
d2Ud2th_R = numpy.matrix([[-numpy.cos(p[2]), numpy.sin(p[2])],[-numpy.sin(p[2]),-numpy.cos(p[2])]])
d2Ud2th = (src*d2Ud2th_R.T).A
H[2,2] = numpy.sum(2*(numpy.square(dUdth[:,0])+numpy.square(dUdth[:,1]) + d[:,0]*d2Ud2th[:,0]+d[:,0]*d2Ud2th[:,0]))
return H
t0 = time.time()
init_pose = (0,0,0)
src = numpy.array([a.T], copy=True).astype(numpy.float32)
dst = numpy.array([b.T], copy=True).astype(numpy.float32)
Tr = numpy.array([[numpy.cos(init_pose[2]),-numpy.sin(init_pose[2]),init_pose[0]],
[numpy.sin(init_pose[2]), numpy.cos(init_pose[2]),init_pose[1]],
[0, 0, 1 ]])
print("src",numpy.shape(src))
print("Tr[0:2]",numpy.shape(Tr[0:2]))
src = cv2.transform(src, Tr[0:2])
p_opt = numpy.array(init_pose)
T_opt = numpy.array([])
error_max = sys.maxsize
first = False
while not(first and time.time() - t0 > max_time):
distances, indices = sklearn.neighbors.NearestNeighbors(n_neighbors=1, algorithm='auto',p = 3).fit(dst[0]).kneighbors(src[0])
p = scipy.optimize.minimize(res,[0,0,0],args=(src[0],dst[0, indices.T][0]),method='Newton-CG',jac=jac,hess=hess).x
T = numpy.array([[numpy.cos(p[2]),-numpy.sin(p[2]),p[0]],[numpy.sin(p[2]), numpy.cos(p[2]),p[1]]])
p_opt[:2] = (p_opt[:2]*numpy.matrix(T[:2,:2]).T).A
p_opt[0] += p[0]
p_opt[1] += p[1]
p_opt[2] += p[2]
src = cv2.transform(src, T)
Tr = (numpy.matrix(numpy.vstack((T,[0,0,1])))*numpy.matrix(Tr)).A
error = res([0,0,0],src[0],dst[0, indices.T][0])
if error < error_max:
error_max = error
first = True
T_opt = Tr
p_opt[2] = p_opt[2] % (2*numpy.pi)
return T_opt, error_max
def main():
import cv2
import numpy
import random
import matplotlib.pyplot
n1 = 100
n2 = 75
bruit = 1/10
center = [random.random()*(2-1)*3,random.random()*(2-1)*3]
radius = random.random()
deformation = 2
template = numpy.array([
[numpy.cos(i*2*numpy.pi/n1)*radius*deformation for i in range(n1)],
[numpy.sin(i*2*numpy.pi/n1)*radius for i in range(n1)]
])
data = numpy.array([
[numpy.cos(i*2*numpy.pi/n2)*radius*(1+random.random()*bruit)+center[0] for i in range(n2)],
[numpy.sin(i*2*numpy.pi/n2)*radius*deformation*(1+random.random()*bruit)+center[1] for i in range(n2)]
])
T,error = icp(data,template)
dx = T[0,2]
dy = T[1,2]
rotation = numpy.arcsin(T[0,1]) * 360 / 2 / numpy.pi
print("T",T)
print("error",error)
print("rotation°",rotation)
print("dx",dx)
print("dy",dy)
result = cv2.transform(numpy.array([data.T], copy=True).astype(numpy.float32), T).T
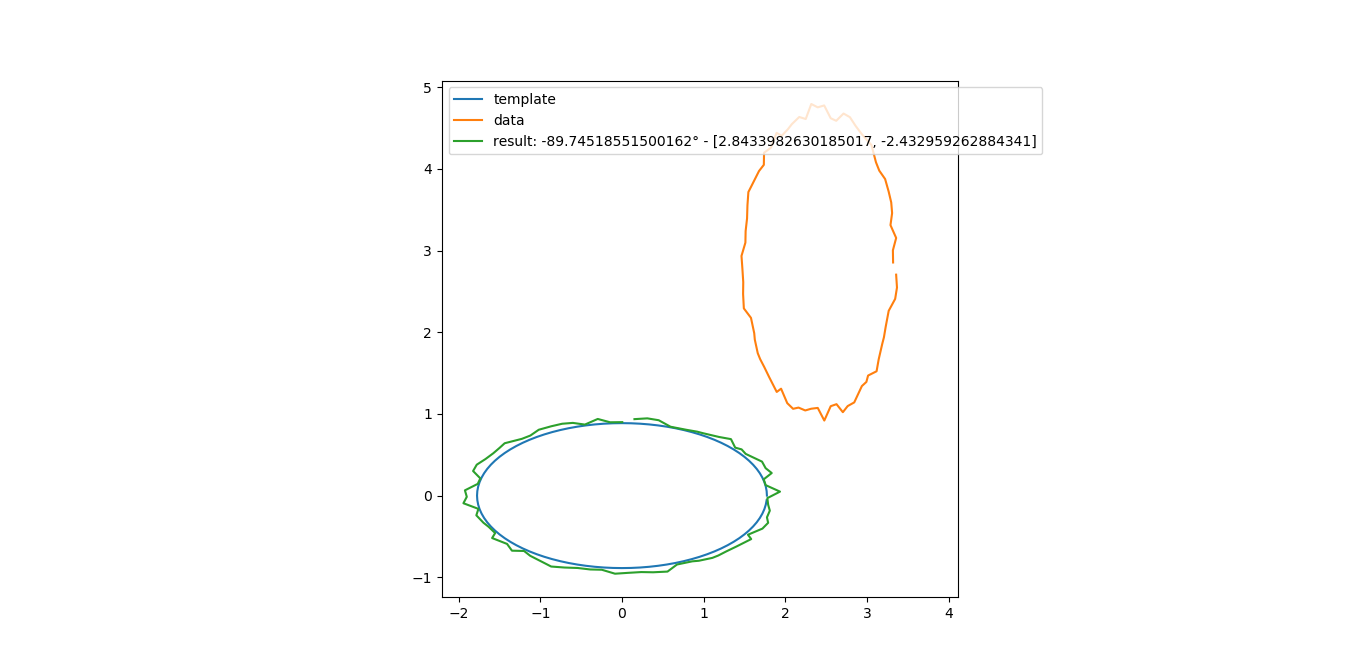
matplotlib.pyplot.plot(template[0], template[1], label="template")
matplotlib.pyplot.plot(data[0], data[1], label="data")
matplotlib.pyplot.plot(result[0], result[1], label="result: "+str(rotation)+"° - "+str([dx,dy]))
matplotlib.pyplot.legend(loc="upper left")
matplotlib.pyplot.axis('square')
matplotlib.pyplot.show()
if __name__ == "__main__":
main()