I have a set of points for which I want to construct KD Tree. After some time I want to add few more points to this KDTree periodically. Is there any way to do this in scipy implementation
Is there any way to add points to KD tree implementation in Scipy
I've posted this as a feature request on the Scipy Github: github.com/scipy/scipy/issues/9029 –
Squib
If you're interested: I've added a more complete example –
Angioma
The problem with k-d-trees is that they are not designed for updates.
While you can somewhat easily insert objects (if you use a pointer based representation, which needs substantially more memory than an array-based tree), and do deletions with tricks such as tombstone messages, doing such changes will degrate the performance of the tree.
I am not aware of a good method for incrementally rebalancing a k-d-tree. For 1-dimensional trees you have red-black-trees, B-trees, B*-trees, B+-trees and such things. These don't obviously work with k-d-trees because of the rotating axes and thus different sorting. So in the end, with a k-d-tree, it may be best to just collect changes, and from time to time do a full tree rebuild. Then at least this part of the tree will be quite good.
However, there exists a similar structure (that in my experiments often outperforms the k-d-tree!): the R*-tree. Instead of performing binary splits, it uses rectangular bounding boxes to collect objects, and a lot of thought was put into making the tree a dynamic data structure. This is also where the R*-tree performs much better than the R-tree: it has a much more clever split for kNN search, and it performs incremental rebalancing to improve its structure.
Any implementation of R*-tree in Python/Scipy? –
Adora
Is a quad-tree better in updating? –
Subdivision
@Adora Yes, see github.com/Toblerity/rtree –
Prue
With https://github.com/stefankoegl/kdtree, it's possible to start with an empty KD-Tree and add nodes one after the other.
pip install kdtree
import kdtree
# Create an empty tree by specifying the number of
# dimensions its points will have
tree = kdtree.create(dimensions=3)
tree.add((1, 2, 3))
I have no idea if it's slower than the one provided by SciPy, but at least it worked fine for my needs (adding points to the Tree, unless there's a point which is too close already).
Here's a more complete example:
import random
import matplotlib.pyplot as plt
import kdtree
SIZE = 100
N = 10_000
MIN_DISTANCE = 5
MIN_DISTANCE_2 = MIN_DISTANCE * MIN_DISTANCE
x, y = random.uniform(0, SIZE), random.uniform(0, SIZE)
tree = kdtree.create(dimensions=2)
tree.add((x, y))
xs, ys = [], []
not_xs, not_ys = [], []
for _ in range(N):
x, y = random.uniform(0, SIZE), random.uniform(0, SIZE)
_neighbour, distance_2 = tree.search_nn((x, y))
if distance_2 > MIN_DISTANCE_2:
xs.append(x)
ys.append(y)
tree.add((x, y))
else:
not_xs.append(x)
not_ys.append(y)
plt.axes().set_aspect(1)
plt.scatter(not_xs, not_ys, color='red', s=0.1)
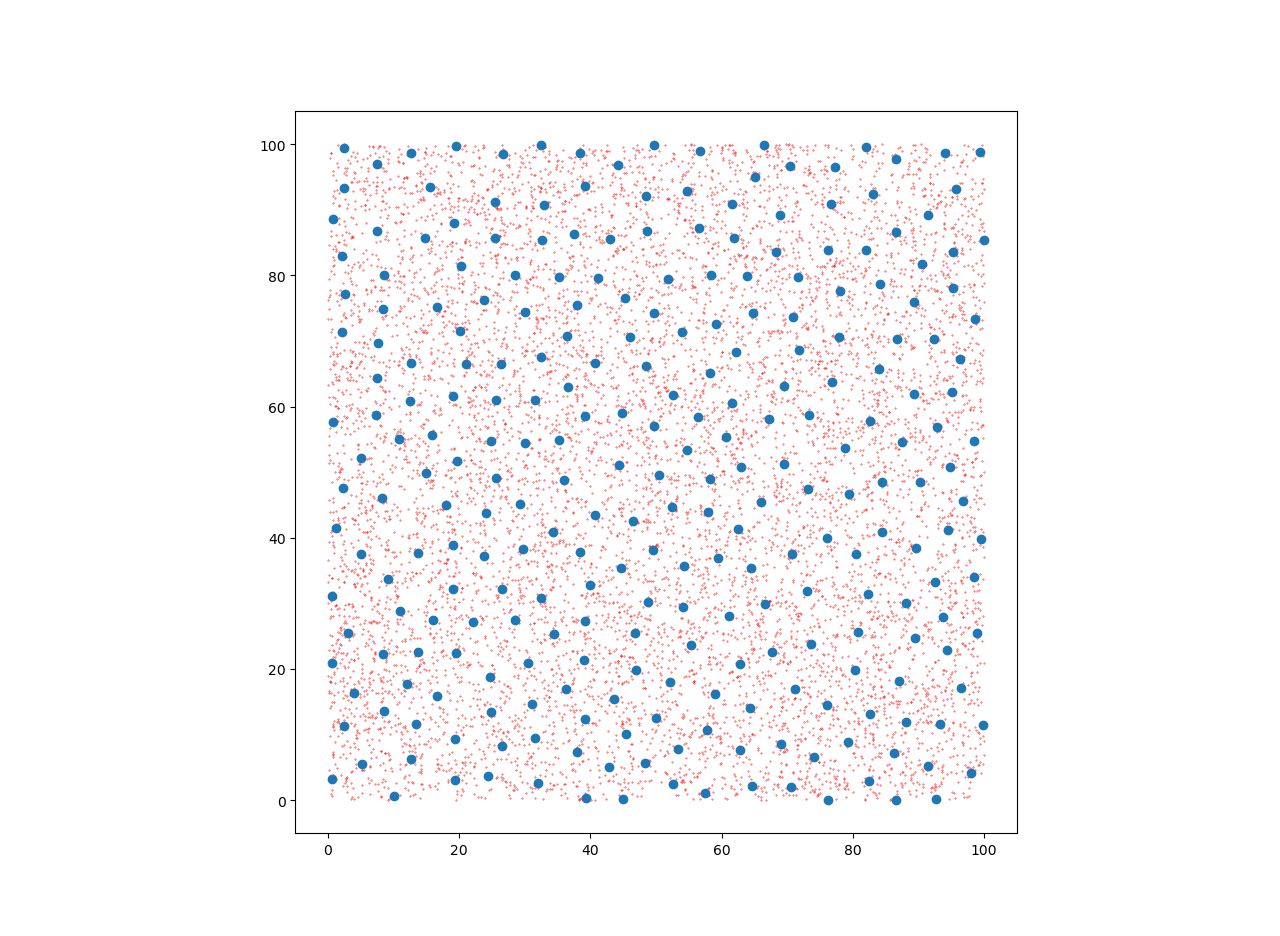
plt.scatter(xs, ys)
plt.show()
It tries to place 10000 points randomly in a 100 * 100 square, but not closer than 5. Placed points are blue, rejected points are red.
© 2022 - 2024 — McMap. All rights reserved.