One of the simplest algorithms for convex hull computation in 3D was presented in the paper The QuickHull algorithm for Convex Hulls by Barber, etc from 1995. Unfortunately the original paper lacks any figures to simplify its understanding.
The algorithm works iteratively by storing boundary faces of some convex set with the vertices from the subset of original points. The remaining points are divided on the ones already inside the current convex set and the points outside it. And each step consists in enlarging the convex set by including one of outside points in it until no one remains.
The authors propose to start the algorithm in 3D from any tetrahedron with 4 vertices in original points. If these vertices are selected so that they are on the boundary of convex hull then it will accelerate the algorithm (they will not be removed from boundary during the following steps). Also the algorithm can start from the boundary surface containing just 2 oppositely oriented triangles with 3 vertices in original points. Such points can be selected as follows.
- The first point has with the minimal (x,y,z) coordinates, if compare coordinates lexicographically.
- The second point is the most distant from the first one.
- The third point is the most distant from the line through the first two points.
The next figure presents initial points and the starting 2 oppositely oriented triangles:
![Start of ConvexHull algorithm]() The remaining points are subdivided in two sets:
The remaining points are subdivided in two sets:
- Black points - above the plane containing the triangles - are associated with the triangle having normal oriented upward.
- Red points - below the plane containing the triangles - are associated with the triangle having normal oriented downward.
On the following steps, the algorithm always associates each point currently outside the convex set with one of the boundary triangles that is "visible" from the point (point is within positive half-space of that triangle). More precisely each outside point is associated with the triangle, for which the distance between the point and the plane containing the triangle is the largest.
On each step of algorithm the furthest outside point is selected, then all faces of the current convex set visible from it are identified, these faces are removed from the convex set and replaced with the triangles having one vertex in furthest point and two other points on the horizon ridge (boundary of removed visible faces).
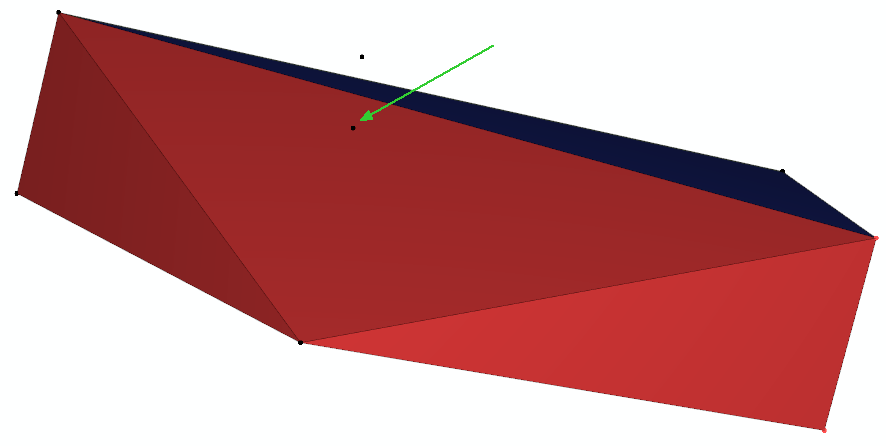
On the next figure the furthest point is pointed by green arrow and three visible triangles are highlighted in red:
![Visible faces from the added point in QuickHull]()
Visible triangles deleted, back faces and inside points can be seen in the hole, horizon ridge is shown with red color:
![Visible triangles deleted, horizon ridge is shown with red color]()
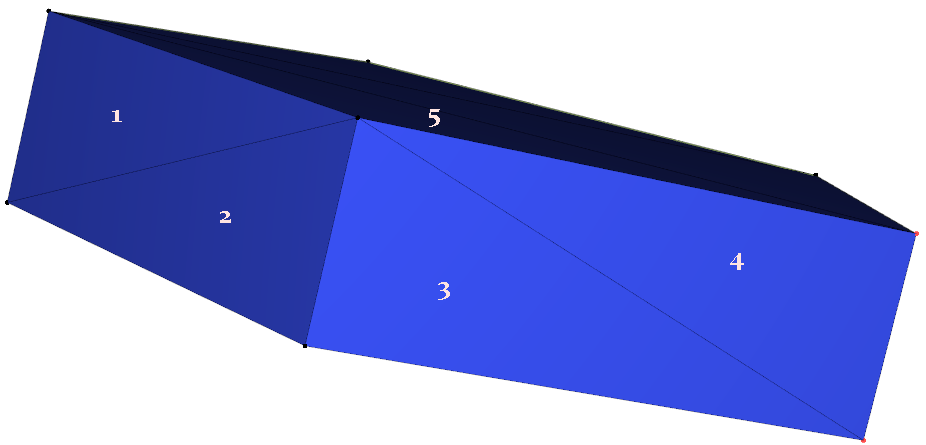
5 new triangles (joining at the added point) patch the hole in the surface:
![Point added, finial convex hull result]()
The points previously associated with the removed triangles are either become inner for the updated convex set or redistributed among new triangles.
The last figure also presents the final result of convex hull computation without any remaining outside points. (The figures were prepared in MeshInspector application, having this algorithm implemented.)