As the title says I want to calculate the surface normals of a given depth image by using the cross product of neighboring pixels. I would like to use Opencv for that and avoid using PCL however, I do not really understand the procedure, since my knowledge is quite limited in the subject. Therefore, I would be grateful is someone could provide some hints. To mention here that I do not have any other information except the depth image and the corresponding rgb image, so no K camera matrix information.
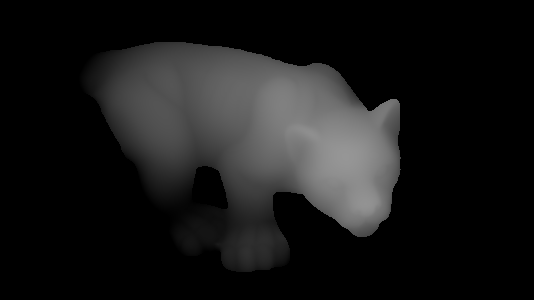
Thus, lets say that we have the following depth image:
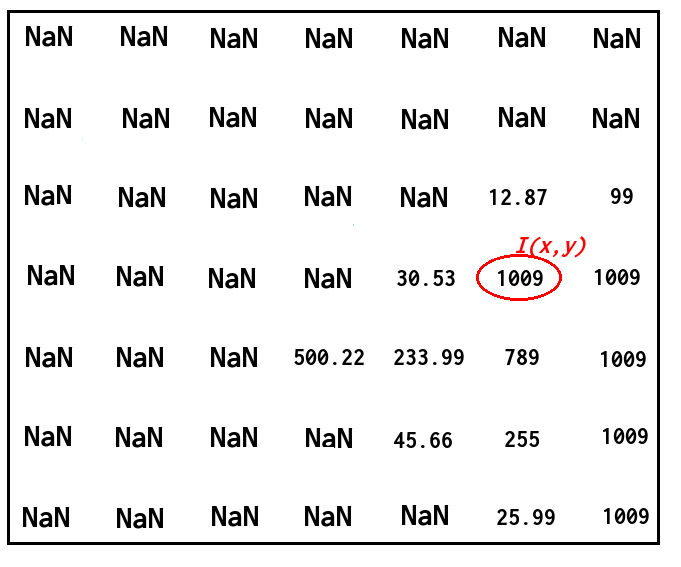
and I want to find the normal vector at a corresponding point with a corresponding depth value like in the following image:
How can I do that using the cross product of the neighbouring pixels? I do not mind if the normals are not highly accurate.
Thanks.
Update:
Ok, I was trying to follow @timday's answer and port his code to Opencv. With the following code:
Mat depth = <my_depth_image> of type CV_32FC1
Mat normals(depth.size(), CV_32FC3);
for(int x = 0; x < depth.rows; ++x)
{
for(int y = 0; y < depth.cols; ++y)
{
float dzdx = (depth.at<float>(x+1, y) - depth.at<float>(x-1, y)) / 2.0;
float dzdy = (depth.at<float>(x, y+1) - depth.at<float>(x, y-1)) / 2.0;
Vec3f d(-dzdx, -dzdy, 1.0f);
Vec3f n = normalize(d);
normals.at<Vec3f>(x, y) = n;
}
}
imshow("depth", depth / 255);
imshow("normals", normals);
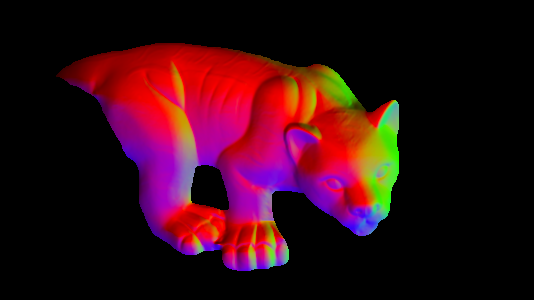
I am getting the correct following result (I had to replace double with float and Vecd to Vecf, I do not know why that would make any difference though):
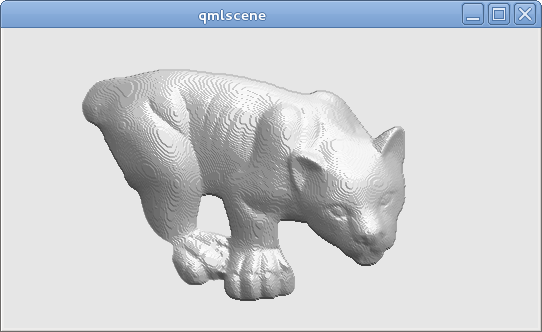
imshow()them then I am getting a nice image compared to the one above. – Artie