This is an important problem, and I am surprised that it is not better addressed in any standard library (at least to my knowledge).
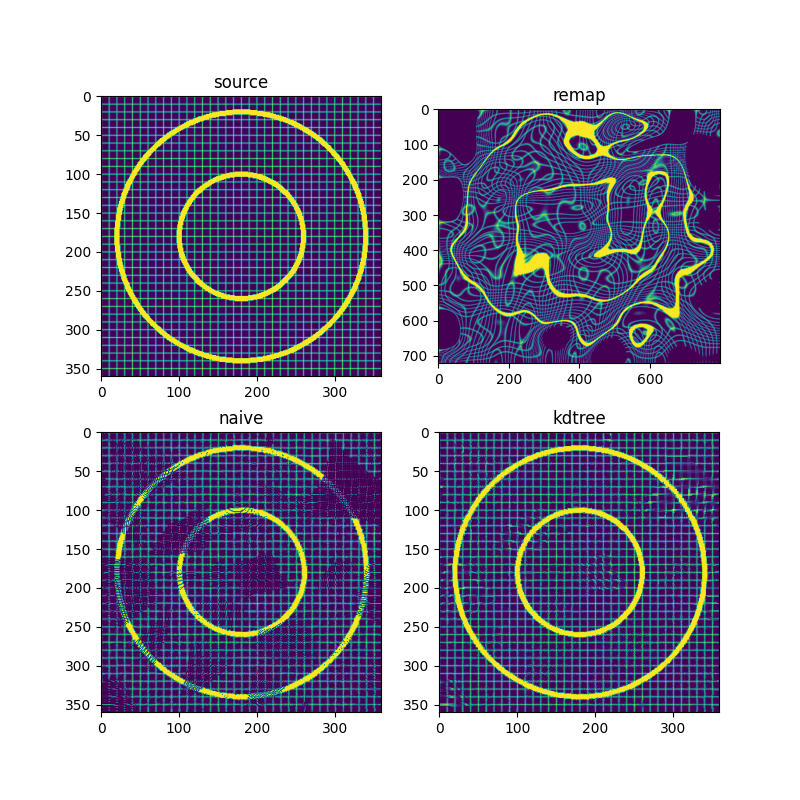
I wasn't happy with the accepted solution as it didn't use the implicit smoothness of the transformation. I might miss important cases, but I cannot imagine mapping that are both invertible in any useful sense and non-smooth at the pixel scale.
Smoothness means that there is no need to compute nearest neighbors: the nearest points are those that are already near on the original grid.
My solution uses the fact that, in the original mapping, a square [(i,j), (i+1, j), (i+1, j+1), (i, j+1)] maps to a quadrilateral [(X[i,j], Y[i,j], X[i+1,j], Y[i+1,j], ...] that has no other points inside. Then the inverse mapping only requires interpolation within the quadrilateral. For this I use an inverse bilinear interpolation, which will give exact results at the vertices and for any other affine transform.
The implementation has no other dependency than numpy. The logic is to run through all quadrilaterals and build progressively the reverse mapping. I copy the code here, hopefully there are enough comments to make the idea clear enough.
A few comments on the less obvious stuff:
- The inverse bilinear function would normally return coordinates only in the range [0,1]. I removed the clipping operation, so that out-of-range values mean that the coordinate is outside of the quadrilateral (that's a contorted way of solving the point-in-polygon problem!). To avoid missing points on the edges, I actually allow for points out of the [0,1] range, which normally means that an index may be picked up by two neighboring quadrilaterals. In these rare cases I just let the result be the average of the two result, trusting that the out-of-range points are "extrapolating" in a reasonable way.
- In general all quadrilaterals have a different shape, and their overlap with the regular grid can go from nothing at all to vary many points. The routine solves all quadrilateral at once (to exploit the vectorised nature of
bilinear_inverse, but at each iteration selects only the quadrilaterals for which the coordinates (offset to their bounding box) are valid.
import numpy as np
def bilinear_inverse(p, vertices, numiter=4):
"""
Compute the inverse of the bilinear map from the unit square
[(0,0), (1,0), (1,1), (0,1)]
to the quadrilateral vertices = [p0, p1, p2, p4]
Parameters:
----------
p: array of shape (2, ...)
Points on which the inverse transforms are applied.
vertices: array of shape (4, 2, ...)
Coordinates of the vertices mapped to the unit square corners
numiter:
Number of Newton interations
Returns:
--------
s: array of shape (2, ...)
Mapped points.
This is a (more general) python implementation of the matlab implementation
suggested in https://mcmap.net/q/380711/-inverse-bilinear-interpolation
"""
p = np.asarray(p)
v = np.asarray(vertices)
sh = p.shape[1:]
if v.ndim == 2:
v = np.expand_dims(v, axis=tuple(range(2, 2 + len(sh))))
# Start in the center
s = .5 * np.ones((2,) + sh)
s0, s1 = s
for k in range(numiter):
# Residual
r = v[0] * (1 - s0) * (1 - s1) + v[1] * s0 * (1 - s1) + v[2] * s0 * s1 + v[3] * (1 - s0) * s1 - p
# Jacobian
J11 = -v[0, 0] * (1 - s1) + v[1, 0] * (1 - s1) + v[2, 0] * s1 - v[3, 0] * s1
J21 = -v[0, 1] * (1 - s1) + v[1, 1] * (1 - s1) + v[2, 1] * s1 - v[3, 1] * s1
J12 = -v[0, 0] * (1 - s0) - v[1, 0] * s0 + v[2, 0] * s0 + v[3, 0] * (1 - s0)
J22 = -v[0, 1] * (1 - s0) - v[1, 1] * s0 + v[2, 1] * s0 + v[3, 1] * (1 - s0)
inv_detJ = 1. / (J11 * J22 - J12 * J21)
s0 -= inv_detJ * (J22 * r[0] - J12 * r[1])
s1 -= inv_detJ * (-J21 * r[0] + J11 * r[1])
return s
def invert_map(xmap, ymap, diagnostics=False):
"""
Generate the inverse of deformation map defined by (xmap, ymap) using inverse bilinear interpolation.
"""
# Generate quadrilaterals from mapped grid points.
quads = np.array([[ymap[:-1, :-1], xmap[:-1, :-1]],
[ymap[1:, :-1], xmap[1:, :-1]],
[ymap[1:, 1:], xmap[1:, 1:]],
[ymap[:-1, 1:], xmap[:-1, 1:]]])
# Range of indices possibly within each quadrilateral
x0 = np.floor(quads[:, 1, ...].min(axis=0)).astype(int)
x1 = np.ceil(quads[:, 1, ...].max(axis=0)).astype(int)
y0 = np.floor(quads[:, 0, ...].min(axis=0)).astype(int)
y1 = np.ceil(quads[:, 0, ...].max(axis=0)).astype(int)
# Quad indices
i0, j0 = np.indices(x0.shape)
# Offset of destination map
x0_offset = x0.min()
y0_offset = y0.min()
# Index range in x and y (per quad)
xN = x1 - x0 + 1
yN = y1 - y0 + 1
# Shape of destination array
sh_dest = (1 + x1.max() - x0_offset, 1 + y1.max() - y0_offset)
# Coordinates of destination array
yy_dest, xx_dest = np.indices(sh_dest)
xmap1 = np.zeros(sh_dest)
ymap1 = np.zeros(sh_dest)
TN = np.zeros(sh_dest, dtype=int)
# Smallish number to avoid missing point lying on edges
epsilon = .01
# Loop through indices possibly within quads
for ix in range(xN.max()):
for iy in range(yN.max()):
# Work only with quads whose bounding box contain indices
valid = (xN > ix) * (yN > iy)
# Local points to check
p = np.array([y0[valid] + ix, x0[valid] + iy])
# Map the position of the point in the quad
s = bilinear_inverse(p, quads[:, :, valid])
# s out of unit square means p out of quad
# Keep some epsilon around to avoid missing edges
in_quad = np.all((s > -epsilon) * (s < (1 + epsilon)), axis=0)
# Add found indices
ii = p[0, in_quad] - y0_offset
jj = p[1, in_quad] - x0_offset
ymap1[ii, jj] += i0[valid][in_quad] + s[0][in_quad]
xmap1[ii, jj] += j0[valid][in_quad] + s[1][in_quad]
# Increment count
TN[ii, jj] += 1
ymap1 /= TN + (TN == 0)
xmap1 /= TN + (TN == 0)
if diagnostics:
diag = {'x_offset': x0_offset,
'y_offset': y0_offset,
'mask': TN > 0}
return xmap1, ymap1, diag
else:
return xmap1, ymap1
Here's a test example
import cv2 as cv
from scipy import ndimage as ndi
# Simulate deformation field
N = 500
sh = (N, N)
t = np.random.normal(size=sh)
dx = ndi.gaussian_filter(t, 40, order=(0,1))
dy = ndi.gaussian_filter(t, 40, order=(1,0))
dx *= 30/dx.max()
dy *= 30/dy.max()
# Test image
img = np.zeros(sh)
img[::10, :] = 1
img[:, ::10] = 1
img = ndi.gaussian_filter(img, 0.5)
# Apply forward mapping
yy, xx = np.indices(sh)
xmap = (xx-dx).astype(np.float32)
ymap = (yy-dy).astype(np.float32)
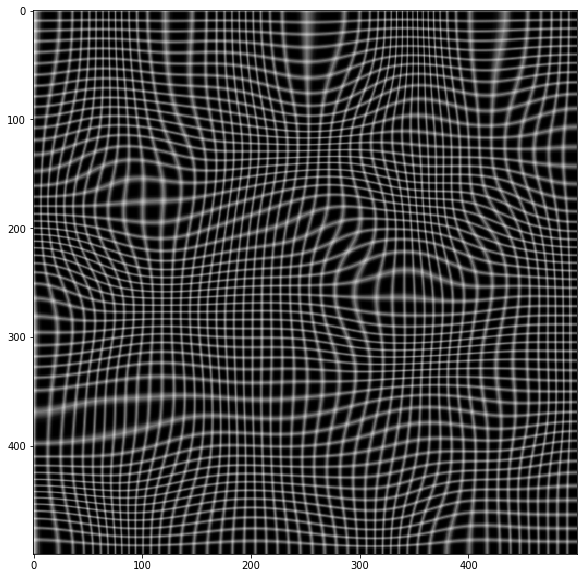
warped = cv.remap(img, xmap, ymap ,cv.INTER_LINEAR)
plt.imshow(warped, cmap='gray')
![Warped image]()
# Now invert the mapping
xmap1, ymap1 = invert_map(xmap, ymap)
unwarped = cv.remap(warped, xmap1.astype(np.float32), ymap1.astype(np.float32) ,cv.INTER_LINEAR)
plt.imshow(unwarped, cmap='gray')
![Unwarpped image]()
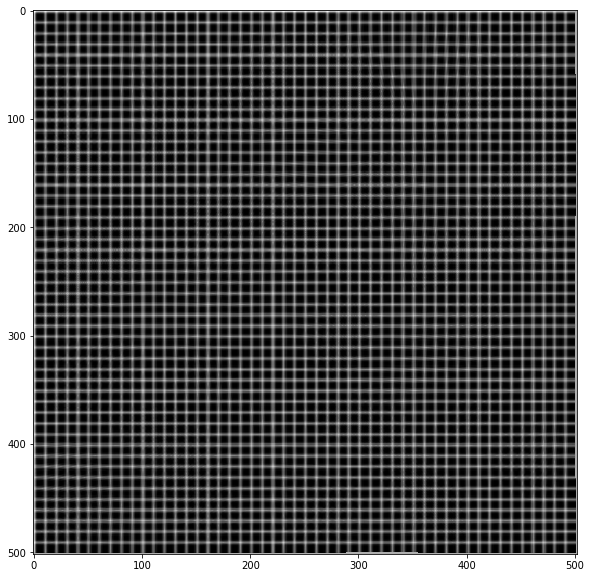


sh_dest = ..., order needs to be (height, width) -- code seems to be taking a good while to execute -- and it seems as if the resulting map contains spurious 0 indices (when needing to stretch the input)... i see hints of that in the last picture (result) – Zitazitah