You can have a look at Telemetry and its associated desktop implementation in python Pytelemetry
Main features
It is a PubSub-based protocol, but unlike MQTT it is a point-to-point protocol, no broker.
As any pubsub protocol, you can publish from one end on a topic and be notified on the other end on that topic.
On the embedded side, publishing to a topic is as simple as :
publish("someTopic","someMessage")
For numbers:
publish_f32("foo",1.23e-4)
publish_u32("bar",56789)
This way of sending variables may seem limited, but the next milestone intends to add extra meaning to the topic's parsing by doing things like this :
// Add an indexing meaning to the topic
publish("foo:1",45) // foo with index = 1
publish("foo:2",56) // foo with index = 2
// Add a grouping meaning to the topic
publish("bar/foo",67) // foo is under group 'bar'
// Combine
publish("bar/foo:45",54)
This is good if you need to send arrays, complex data structures, etc.
Also, the PubSub pattern is great because of its flexibility. You can build master/slave applications, device to device, etc.
C library ![GitHub version]()
The C library is very simple to add on any new device as long as you have a decent UART library on it.
You just have to instanciate a data structure called TM_transport (defined by Telemetry), and assign the 4 function pointers read readable write writeable.
// your device's uart library function signatures (usually you already have them)
int32_t read(void * buf, uint32_t sizeToRead);
int32_t readable();
int32_t write(void * buf, uint32_t sizeToWrite);
int32_t writeable();
To use Telemetry, you just have to add the following code
// At the beginning of main function, this is the ONLY code you have to add to support a new device with telemetry
TM_transport transport;
transport.read = read;
transport.write = write;
transport.readable = readable;
transport.writeable = writeable;
// Init telemetry with the transport structure
init_telemetry(&transport);
// and you're good to start publishing
publish_i32("foobar",...
Python library ![PyPI version]()
On the desktop side, there is the pytelemetry module that implements the protocol.
If you know python, the following code connects to a serial port, publishes once on topic foo, prints all received topics during 3 seconds then terminates.
import runner
import pytelemetry.pytelemetry as tm
import pytelemetry.transports.serialtransport as transports
import time
transport = transports.SerialTransport()
telemetry = tm.pytelemetry(transport)
app = runner.Runner(transport,telemetry)
def printer(topic, data):
print(topic," : ", data)
options = dict()
options['port'] = "COM20"
options['baudrate'] = 9600
app.connect(options)
telemetry.subscribe(None, printer)
telemetry.publish('bar',1354,'int32')
time.sleep(3)
app.terminate()
If you don't know python, you can use the command line interface
Pytelemetry CLI ![PyPI version]()
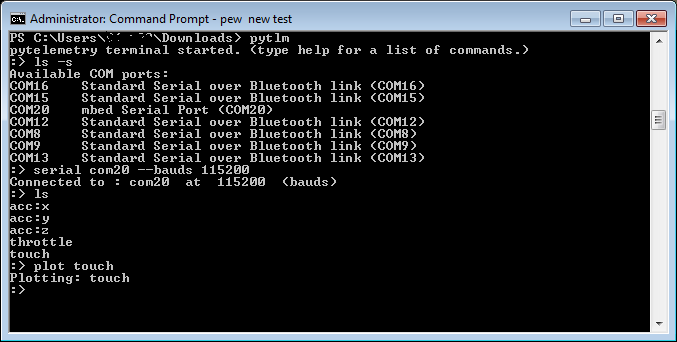
The command line can be started with
pytlm
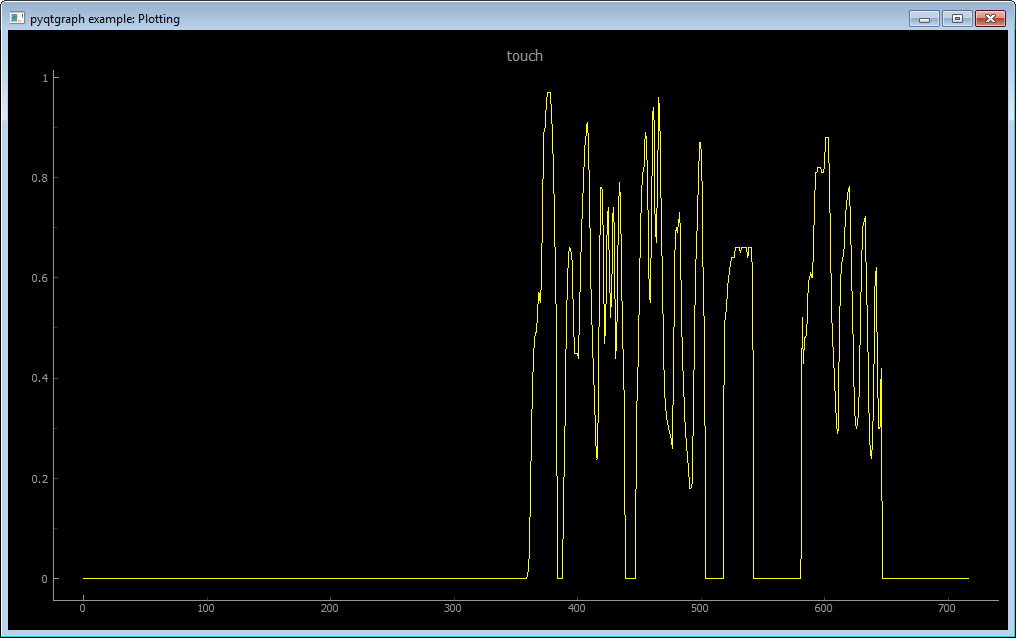
Then you can connect, ls(list) received topics, print data received on a topic, pub(publish) on a topic, or open a plot on a topic to display received data in real-time
![enter image description here]()
![enter image description here]()