Here is an open source java library that will perform the trilateration/multilateration:
https://github.com/lemmingapex/Trilateration
![example]()
It uses a popular nonlinear least squares optimizer, the Levenberg-Marquardt algorithm, from Apache Commons Math.
double[][] positions = new double[][] { { 5.0, -6.0 }, { 13.0, -15.0 }, { 21.0, -3.0 }, { 12.42, -21.2 } };
double[] distances = new double[] { 8.06, 13.97, 23.32, 15.31 };
NonLinearLeastSquaresSolver solver = new NonLinearLeastSquaresSolver(new TrilaterationFunction(positions, distances), new LevenbergMarquardtOptimizer());
Optimum optimum = solver.solve();
// the answer
double[] calculatedPosition = optimum.getPoint().toArray();
// error and geometry information
RealVector standardDeviation = optimum.getSigma(0);
RealMatrix covarianceMatrix = optimum.getCovariances(0);
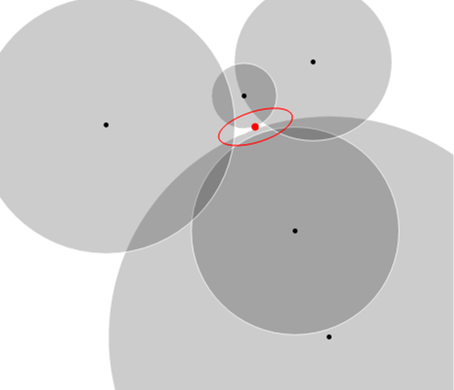
Most scholarly examples, like the one on wikipedia, deal with exactly three circles and assume perfectly accurate information. These circumstances allow for much simpler problem formulations with exact answers, and are usually not satisfactory for practical situations.
The problem in R2 or R3 euclidean space with distances that contain measurement error, an area (ellipse) or volume (ellipsoid) of interest is usually obtained instead of a point. If a point estimate is desired instead of a region, the area centroid or volume centroid should be used. R2 space requires at least 3 non-degenerate points and distances to obtain a unique region; and similarly R3 space requires at least 4 non-degenerate points and distances to obtain a unique region.
{kind=link}
{kind=link}