First, I have to admit I agree with generic_opto_guy:
The approach with the loop looks good, so we would need to check the math. On thing I noticed: if (oldRow > 0 && oldCol > 0 && oldRow <= oldHeight && oldCol <= oldWidth) implies you start indexing with 1. I belife that opencv starts indexing with 0.
For all that, I couldn't resist to answer. (May be, it's just an image phase of mine.)
Instead of fiddling with sin() and cos(), I would recommend to use matrix transformation. At the first glance, this might appear over-engineered but later you will recognize that it bears much more flexibility. With a transformation matrix, you can express a lot of transformations (translation, rotation, scaling, shearing, projection) as well as combining multiple transformations into one matrix.
(A teaser for what is possible: SO: How to paint / deform a QImage in 2D?)
In an image, the pixels may be addressed by 2d coordinates. Hence a 2×2 matrix comes into mind but a 2×2 matrix cannot express translations. For this, homogeneous coordinates has been introduced – a math trick to handle positions and directions in the same space by extending the dimension by one.
To make it short, a 2d position (x, y) has the homogeneous coordinates (x, y, 1).
A position transformed with a transformation matrix:
v´ = M · v.
This may or may not change the value of third component. To convert the homogeneous coordinate to 2D position again, x and y has to be divided by 3rd component.
Vec2 transform(const Mat3x3 &mat, const Vec2 &pos)
{
const Vec3 pos_ = mat * Vec3(pos, 1.0);
return Vec2(pos_.x / pos_.z, pos_.y / pos_.z);
}
To transform a source image into a destination image, the following function can be used:
void transform(
const Image &imgSrc, const Mat3x3 &mat, Image &imgDst,
int rgbFail = 0x808080)
{
const Mat3x3 matInv = invert(mat);
for (int y = 0; y < imgDst.h(); ++y) {
for (int x = 0; x < imgDst.w(); ++x) {
const Vec2 pos = transform(matInv, Vec2(x, y));
const int xSrc = (int)(pos.x + 0.5), ySrc = (int)(pos.y + 0.5);
imgDst.setPixel(x, y,
xSrc >= 0 && xSrc < imgSrc.w() && ySrc >= 0 && ySrc < imgSrc.h()
? imgSrc.getPixel(xSrc, ySrc)
: rgbFail);
}
}
}
Note:
The transformation matrix mat describes the transformation of source image coordinates to destination image coordinates. The nested loops iterate over destination image. Hence, the inverse matrix (representing the reverse transformation) has to be used to get the corresponding source image coordinates which map to the current destination coordinates.
… and the matrix constructor for the rotation:
enum ArgInitRot { InitRot };
template <typename VALUE>
struct Mat3x3T {
union {
VALUE comp[3 * 3];
struct {
VALUE _00, _01, _02;
VALUE _10, _11, _12;
VALUE _20, _21, _22;
};
};
// constructor to build a matrix for rotation
Mat3x3T(ArgInitRot, VALUE angle):
_00(std::cos(angle)), _01(-std::sin(angle)), _02((VALUE)0),
_10(std::sin(angle)), _11( std::cos(angle)), _12((VALUE)0),
_20( (VALUE)0), _21( (VALUE)0), _22((VALUE)1)
{ }
can be used to construct a rotation with angle (in degree):
Mat3x3T<double> mat(InitRot, degToRad(30.0));
Note:
I would like to emphasize how the transformed coordinates are used:
const Vec2 pos = transform(matInv, Vec2(x, y));
const int xSrc = (int)(pos.x + 0.5), ySrc = (int)(pos.y + 0.5);
Rounding the results to yield one discrete pixel position is actually what is called Nearest Neighbour. Alternatively, the now discarded fractional parts could be used for a linear interpolation between neighbour pixels.
To make a small sample, I first copied image.h, image.cc, imagePPM.h, and imagePPM.cc from another answer I wrote recently. (The PPM file format has been used as it needs minimal code for file I/O.)
Next, I used linMath.h (my minimal math collection for 3D transformations) to make a minimal math collection for 2D transformations – linMath.h:
#ifndef LIN_MATH_H
#define LIN_MATH_H
#include <iostream>
#include <cassert>
#include <cmath>
extern const double Pi;
template <typename VALUE>
inline VALUE degToRad(VALUE angle)
{
return (VALUE)Pi * angle / (VALUE)180;
}
template <typename VALUE>
inline VALUE radToDeg(VALUE angle)
{
return (VALUE)180 * angle / (VALUE)Pi;
}
enum ArgNull { Null };
template <typename VALUE>
struct Vec2T {
typedef VALUE Value;
Value x, y;
// default constructor (leaving elements uninitialized)
Vec2T() { }
Vec2T(ArgNull): x((Value)0), y((Value)0) { }
Vec2T(Value x, Value y): x(x), y(y) { }
};
typedef Vec2T<float> Vec2f;
typedef Vec2T<double> Vec2;
template <typename VALUE>
struct Vec3T {
typedef VALUE Value;
Value x, y, z;
// default constructor (leaving elements uninitialized)
Vec3T() { }
Vec3T(ArgNull): x((Value)0), y((Value)0), z((Value)0) { }
Vec3T(Value x, Value y, Value z): x(x), y(y), z(z) { }
Vec3T(const Vec2T<Value> &xy, Value z): x(xy.x), y(xy.y), z(z) { }
explicit operator Vec2T<Value>() const { return Vec2T<Value>(x, y); }
const Vec2f xy() const { return Vec2f(x, y); }
const Vec2f xz() const { return Vec2f(x, z); }
const Vec2f yz() const { return Vec2f(y, z); }
};
typedef Vec3T<float> Vec3f;
typedef Vec3T<double> Vec3;
enum ArgInitIdent { InitIdent };
enum ArgInitTrans { InitTrans };
enum ArgInitRot { InitRot };
enum ArgInitScale { InitScale };
enum ArgInitFrame { InitFrame };
template <typename VALUE>
struct Mat3x3T {
union {
VALUE comp[3 * 3];
struct {
VALUE _00, _01, _02;
VALUE _10, _11, _12;
VALUE _20, _21, _22;
};
};
// default constructor (leaving elements uninitialized)
Mat3x3T() { }
// constructor to build a matrix by elements
Mat3x3T(
VALUE _00, VALUE _01, VALUE _02,
VALUE _10, VALUE _11, VALUE _12,
VALUE _20, VALUE _21, VALUE _22):
_00(_00), _01(_01), _02(_02),
_10(_10), _11(_11), _12(_12),
_20(_20), _21(_21), _22(_22)
{ }
// constructor to build an identity matrix
Mat3x3T(ArgInitIdent):
_00((VALUE)1), _01((VALUE)0), _02((VALUE)0),
_10((VALUE)0), _11((VALUE)1), _12((VALUE)0),
_20((VALUE)0), _21((VALUE)0), _22((VALUE)1)
{ }
// constructor to build a matrix for translation
Mat3x3T(ArgInitTrans, const Vec2T<VALUE> &t):
_00((VALUE)1), _01((VALUE)0), _02((VALUE)t.x),
_10((VALUE)0), _11((VALUE)1), _12((VALUE)t.y),
_20((VALUE)0), _21((VALUE)0), _22((VALUE)1)
{ }
// constructor to build a matrix for rotation
Mat3x3T(ArgInitRot, VALUE angle):
_00(std::cos(angle)), _01(-std::sin(angle)), _02((VALUE)0),
_10(std::sin(angle)), _11( std::cos(angle)), _12((VALUE)0),
_20( (VALUE)0), _21( (VALUE)0), _22((VALUE)1)
{ }
// constructor to build a matrix for translation/rotation
Mat3x3T(ArgInitFrame, const Vec2T<VALUE> &t, VALUE angle):
_00(std::cos(angle)), _01(-std::sin(angle)), _02((VALUE)t.x),
_10(std::sin(angle)), _11( std::cos(angle)), _12((VALUE)t.y),
_20( (VALUE)0), _21( (VALUE)0), _22((VALUE)1)
{ }
// constructor to build a matrix for scaling
Mat3x3T(ArgInitScale, VALUE sx, VALUE sy):
_00((VALUE)sx), _01( (VALUE)0), _02((VALUE)0),
_10( (VALUE)0), _11((VALUE)sy), _12((VALUE)0),
_20( (VALUE)0), _21( (VALUE)0), _22((VALUE)1)
{ }
// operator to allow access with [][]
VALUE* operator [] (int i)
{
assert(i >= 0 && i < 3);
return comp + 3 * i;
}
// operator to allow access with [][]
const VALUE* operator [] (int i) const
{
assert(i >= 0 && i < 3);
return comp + 3 * i;
}
// multiply matrix with matrix -> matrix
Mat3x3T operator * (const Mat3x3T &mat) const
{
return Mat3x3T(
_00 * mat._00 + _01 * mat._10 + _02 * mat._20,
_00 * mat._01 + _01 * mat._11 + _02 * mat._21,
_00 * mat._02 + _01 * mat._12 + _02 * mat._22,
_10 * mat._00 + _11 * mat._10 + _12 * mat._20,
_10 * mat._01 + _11 * mat._11 + _12 * mat._21,
_10 * mat._02 + _11 * mat._12 + _12 * mat._22,
_20 * mat._00 + _21 * mat._10 + _22 * mat._20,
_20 * mat._01 + _21 * mat._11 + _22 * mat._21,
_20 * mat._02 + _21 * mat._12 + _22 * mat._22);
}
// multiply matrix with vector -> vector
Vec3T<VALUE> operator * (const Vec3T<VALUE> &vec) const
{
return Vec3T<VALUE>(
_00 * vec.x + _01 * vec.y + _02 * vec.z,
_10 * vec.x + _11 * vec.y + _12 * vec.z,
_20 * vec.x + _21 * vec.y + _22 * vec.z);
}
};
typedef Mat3x3T<float> Mat3x3f;
typedef Mat3x3T<double> Mat3x3;
template <typename VALUE>
std::ostream& operator<<(std::ostream &out, const Mat3x3T<VALUE> &m)
{
return out
<< m._00 << '\t' << m._01 << '\t' << m._02 << '\n'
<< m._10 << '\t' << m._11 << '\t' << m._12 << '\n'
<< m._20 << '\t' << m._21 << '\t' << m._22 << '\n';
}
/* computes determinant of a matrix.
*
* det = |M|
*
* mat ... the matrix
*/
template <typename VALUE>
VALUE determinant(const Mat3x3T<VALUE> &mat)
{
return mat._00 * mat._11 * mat._22
+ mat._01 * mat._12 * mat._20
+ mat._02 * mat._10 * mat._21
- mat._20 * mat._11 * mat._02
- mat._21 * mat._12 * mat._00
- mat._22 * mat._10 * mat._01;
}
/* returns the inverse of a regular matrix.
*
* mat matrix to invert
* eps epsilon for regularity of matrix
*/
template <typename VALUE>
Mat3x3T<VALUE> invert(
const Mat3x3T<VALUE> &mat, VALUE eps = (VALUE)1E-10)
{
assert(eps >= (VALUE)0);
// compute determinant and check that it its unequal to 0
// (Otherwise, matrix is singular!)
const VALUE det = determinant(mat);
if (std::abs(det) < eps) throw std::domain_error("Singular matrix!");
// reciproke of determinant
const VALUE detInvPos = (VALUE)1 / det, detInvNeg = -detInvPos;
// compute each element by determinant of sub-matrix which is build
// striking out row and column of pivot element itself
// BTW, the determinant is multiplied with -1 when sum of row and column
// index is odd (chess board rule)
// (This is usually called cofactor of related element.)
// transpose matrix and multiply with 1/determinant of original matrix
return Mat3x3T<VALUE>(
detInvPos * (mat._11 * mat._22 - mat._12 * mat._21),
detInvNeg * (mat._01 * mat._22 - mat._02 * mat._21),
detInvPos * (mat._01 * mat._12 - mat._02 * mat._11),
detInvNeg * (mat._10 * mat._22 - mat._12 * mat._20),
detInvPos * (mat._00 * mat._22 - mat._02 * mat._20),
detInvNeg * (mat._00 * mat._12 - mat._02 * mat._10),
detInvPos * (mat._10 * mat._21 - mat._11 * mat._20),
detInvNeg * (mat._00 * mat._21 - mat._01 * mat._20),
detInvPos * (mat._00 * mat._11 - mat._01 * mat._10));
}
#endif // LIN_MATH_H
and the definition of Pi in linMath.cc:
#include "linmath.h"
const double Pi = 3.1415926535897932384626433832795;
Having all tools available, I made the sample application xformRGBImg.cc:
#include <iostream>
#include <fstream>
#include <sstream>
#include <string>
#include "linMath.h"
#include "image.h"
#include "imagePPM.h"
typedef unsigned int uint;
struct Error {
const std::string text;
Error(const char *text): text(text) { }
};
const char* readArg(int &i, int argc, char **argv)
{
++i;
if (i >= argc) throw Error("Missing argument!");
return argv[i];
}
uint readArgUInt(int &i, int argc, char **argv)
{
const char *arg = readArg(i, argc, argv); char *end;
const unsigned long value = strtoul(arg, &end, 0);
if (arg == end || *end) throw Error("Unsigned integer value expected!");
if ((uint)value != value) throw Error("Unsigned integer overflow!");
return (uint)value;
}
double readArgDouble(int &i, int argc, char **argv)
{
const char *arg = readArg(i, argc, argv); char *end;
const double value = strtod(arg, &end);
if (arg == end || *end) throw Error("Floating point value expected!");
return value;
}
std::pair<uint, uint> resize(int &i, int argc, char **argv)
{
const uint w = readArgUInt(i, argc, argv);
const uint h = readArgUInt(i, argc, argv);
return std::make_pair(w, h);
}
Mat3x3 translate(int &i, int argc, char **argv)
{
const double x = readArgDouble(i, argc, argv);
const double y = readArgDouble(i, argc, argv);
return Mat3x3(InitTrans, Vec2(x, y));
}
Mat3x3 rotate(int &i, int argc, char **argv)
{
const double angle = readArgDouble(i, argc, argv);
return Mat3x3(InitRot, degToRad(angle));
}
Mat3x3 scale(int &i, int argc, char **argv)
{
const double x = readArgDouble(i, argc, argv);
const double y = readArgDouble(i, argc, argv);
return Mat3x3(InitScale, x, y);
}
Vec2 transform(const Mat3x3 &mat, const Vec2 &pos)
{
const Vec3 pos_ = mat * Vec3(pos, 1.0);
return Vec2(pos_.x / pos_.z, pos_.y / pos_.z);
}
void transform(
const Image &imgSrc, const Mat3x3 &mat, Image &imgDst,
int rgbFail = 0x808080)
{
const Mat3x3 matInv = invert(mat);
for (int y = 0; y < imgDst.h(); ++y) {
for (int x = 0; x < imgDst.w(); ++x) {
const Vec2 pos = transform(matInv, Vec2(x, y));
const int xSrc = (int)(pos.x + 0.5), ySrc = (int)(pos.y + 0.5);
imgDst.setPixel(x, y,
xSrc >= 0 && xSrc < imgSrc.w() && ySrc >= 0 && ySrc < imgSrc.h()
? imgSrc.getPixel(xSrc, ySrc)
: rgbFail);
}
}
}
const char *const usage =
"Usage:\n"
" xformRGBImg IN_FILE OUT_FILE [[CMD]...]\n"
"\n"
"Commands:\n"
" resize W H\n"
" translate X Y\n"
" rotate ANGLE\n"
" scale SX SY\n";
int main(int argc, char **argv)
{
// read command line arguments
if (argc <= 2) {
std::cerr << "Missing arguments!\n";
std::cout << usage;
return 1;
}
const std::string inFile = argv[1];
const std::string outFile = argv[2];
std::pair<uint, uint> sizeOut(0, 0);
Mat3x3 mat(InitIdent);
for (int i = 3; i < argc; ++i) try {
const std::string cmd = argv[i];
if (cmd == "resize") sizeOut = resize(i, argc, argv);
else if (cmd == "translate") mat = translate(i, argc, argv) * mat;
else if (cmd == "rotate") mat = rotate(i, argc, argv) * mat;
else if (cmd == "scale") mat = scale(i, argc, argv) * mat;
else {
std::cerr << "Wrong command!\n";
std::cout << usage;
return 1;
}
} catch (const Error &error) {
std::cerr << "Wrong argument at $" << i << "\n"
<< error.text << '\n';
std::cout << usage;
return 1;
}
// read image
Image imgSrc;
{ std::ifstream fIn(inFile.c_str(), std::ios::binary);
if (!readPPM(fIn, imgSrc)) {
std::cerr << "Reading '" << inFile << "' failed!\n";
return 1;
}
}
// set output image size
if (sizeOut.first * sizeOut.second == 0) {
sizeOut = std::make_pair(imgSrc.w(), imgSrc.h());
}
// transform image
Image imgDst;
imgDst.resize(sizeOut.first, sizeOut.second, 3 * sizeOut.second);
transform(imgSrc, mat, imgDst);
// write image
{ std::ofstream fOut(outFile.c_str(), std::ios::binary);
if (!writePPM(fOut, imgDst) || (fOut.close(), !fOut.good())) {
std::cerr << "Writing '" << outFile << "' failed!\n";
return 1;
}
}
// done
return 0;
}
Note:
The command line arguments are processed in order. Each transformation command is multiplied from left to the already combined transformation matrix, starting with an identity matrix. This is because a concatenation of transformations results in the reverse ordered multiplication of matrices. (The matrix multiplication is right associative.)
E.g. the corresponding matrix for a transform:
x' = translate(x)
x" = rotate(x')
x"' = scale(x")
which is
x"' = scale(rotate(translate(x)))
is
Mtransform = Mscale · Mrotate · Mtranslate
and
x"' = Mscale · Mrotate · Mtranslate · x = Mtransform · x
Compiled and tested in cygwin:
$ g++ -std=c++11 -o xformRGBImg image.cc imagePPM.cc linMath.cc xformRGBImg.cc
$ ./xformRGBImg
Missing arguments!
Usage:
xformRGBImg IN_FILE OUT_FILE [[CMD]...]
Commands:
resize W H
translate X Y
rotate ANGLE
scale SX SY
$
Finally, a sample image cat.jpg (converted to PPM in GIMP):
![Original image cat.ppm]()
with size 300 × 300.
Note:
All embedded images are converted from PPM to JPEG (in GIMP again). (PPM is not supported in image upload, nor can I imagine that any browser can display it properly.)
To start with a minimum:
$ ./xformRGBImg cat.ppm cat.copy.ppm
$
![Identity transformed image cat.copy.ppm]()
It looks like the original – what should be expected by an identity transform.
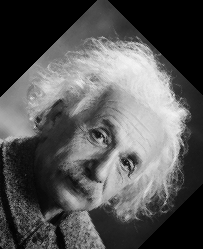
Now, a rotation with 30°:
$ ./xformRGBImg cat.ppm cat.rot30.ppm rotate 30
$
![Rotation with 30° image cat.rot30.ppm]()
To rotate about a certain center, there is a resp. translation before and afterwards needed:
$ ./xformRGBImg cat.ppm cat.rot30c150,150.ppm \
translate -150 -150 rotate 30 translate 150 150
$
![Rotation with 30° about center (150, 150) image cat.rot30c150,150.ppm]()
The output image can be resized with w · √2 × h · √2 to fit any center rotation in.
So, the output image is resized to 425 × 425 where the last translation is adjusted respectively to translate 212.5 212.5:
$ ./xformRGBImg cat.ppm cat.rot30c150,150.425x425.ppm \
resize 425 425 translate -150 -150 rotate 30 translate 212.5 212.5
$
![Rotation with 30° about center (150, 150) into resized image cat.rot30c150,150.425x425.ppm]()
The scaling has not yet been checked:
$ ./xformRGBImg cat.ppm cat.rot30c150,150s0.7,0.7.ppm \
translate -150 -150 rotate 30 scale 0.7 0.7 translate 150 150
$
![Rotation with 30° about center (150, 150) and uniform scaling with 0.7 image cat.rot30c150,150s0.7,0.7.ppm]]()
Finally, to be fair, I would like to mention the “big brother” of my little toy tool: ImageMagick.





![Rotation with 30° about center (150, 150) and uniform scaling with 0.7 image cat.rot30c150,150s0.7,0.7.ppm]](https://static.mcmap.net/file/mcmap/ZG-AbGLDKwfpKnMxcF_AZVLQamyA/4RCG0.jpg)
if (oldRow > 0 && oldCol > 0 && oldRow <= oldHeight && oldCol <= oldWidth)implies you start indexing with 1. I belife that opencv starts indexing with 0. – Hakim