I can compute a depth map with cv2.StereoSGBM that looks pretty good. Now I want to apply WLS filtering as described here.
This answer has some info, which I follow below, but I can't quite get to work.
How do I use ximgproc_DisparityWLSFilter in Python? I know the theory and how to do it in C++, but can't find any documentation for how the functions were wrapped in Python. (Using OpenCV 4.2.0). This is the source on GitHub, but it doesn't contain the Python bindings either.
Doing:
wls = cv2.ximgproc_DisparityWLSFilter.filter(disparity_SGBM, imgL)
Gives:
Traceback (most recent call last):
File ".\stereo_SGBM_filtering.py", line 158, in <module>
wls = cv2.ximgproc_DisparityWLSFilter.filter(disparity_SGBM, imgL)
TypeError: descriptor 'filter' requires a 'cv2.ximgproc_DisparityFilter' object but received a 'numpy.ndarray'
So I know I'm at least able to access the functions.
Fixing it like this:
wls = cv2.ximgproc_DisparityWLSFilter(stereoSGBM)
filtered_disparity_map = wls.filter(disparity_SGBM, imgL)
Doesn't give any errors, but also doesn't give me an image.
Full details:
Original images (Tsukuba from the Middlebury data set).
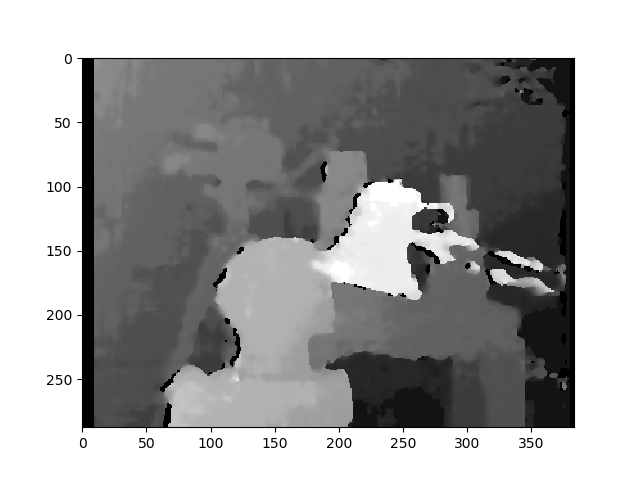
My depth map looks like this:
import cv2
imgL = cv2.imread("tsukuba_l.png", cv2.IMREAD_GRAYSCALE) # left image
...
win_size = 2
min_disp = -4
max_disp = 9
num_disp = max_disp - min_disp # Needs to be divisible by 16
stereoSGBM = cv2.StereoSGBM_create(
minDisparity=min_disp,
numDisparities=num_disp,
blockSize=5,
uniquenessRatio=5,
speckleWindowSize=5,
speckleRange=5,
disp12MaxDiff=2,
P1=8 * 3 * win_size ** 2,
P2=32 * 3 * win_size ** 2,
)
disparity_SGBM = stereoSGBM.compute(imgL_undistorted, imgR_undistorted)
wls = cv2.ximgproc_DisparityWLSFilter(stereoSGBM)
filtered_disparity_map = wls.filter(disparity_SGBM, imgL)