Bat and Ball collision
The best way to handle ball and rectangle collision is to exploit the symmetry of the system.
Ball as a point.
First the ball, it has a radius r that defines all the points r distance from the center. But we can turn the ball into a point and add to the rectangle the radius. The ball is now just a single point moving over time, which is a line.
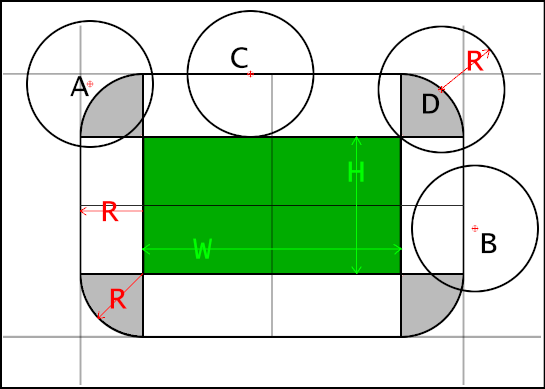
The rectangle has grown on all sides by radius. The diagram shows how this works.
![enter image description here]()
The green rectangle is the original rectangle. The balls A,B are not touching the rectangle, while the balls C,D are touching. The balls A,D represent a special case, but is easy to solve as you will see.
All motion as a line.
So now we have a larger rectangle and a ball as a point moving over time (a line), but the rectangle is also moving, which means over time the edges will sweep out areas which is too complicated for my brain, so once again we can use symmetry, this time in relative movement.
From the bat's point of view it is stationary while the ball is moving, and from the ball, it is still while the bat is moving. They both see each other move in the opposite directions.
As the ball is now a point, making changes to its movement will only change the line it travels along. So we can now fix the bat in space and subtract its movement from the ball. And as the bat is now fixed we can move its center point to the origin, (0,0) and move the ball in the opposite direction.
At this point we make an important assumption. The ball and bat are always in a state that they are not touching, when we move the ball and/or bat then they may touch. If they do make contact we calculate a new trajectory so that they are not touching.
Two possible collisions
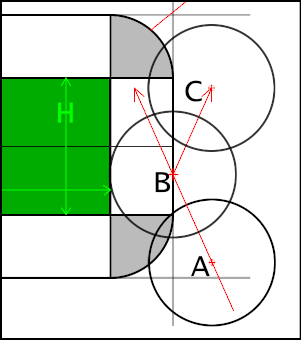
There are now two possible collision cases, one where the ball hits the side of the bat, and one where the ball hits the corner of the bat.
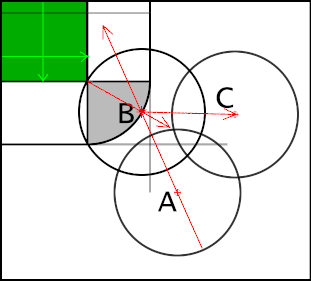
The next images show the bat at the origin and the ball relative to the bat in both motion and position. It is travelling along the red line from A to B then bounces off to C
Ball hits edge
![enter image description here]()
Ball hits corner
![enter image description here]()
As there is symmetry here as well which side or corner is hit does not make any difference. In fact we can mirror the whole problem depending on which size the ball is from the center of the bat. So if the ball is left of the bat then mirror its position and motion in the x direction, and the same for the y direction (you must keep track of this mirror via a semaphore so you can reverse it once the solution is found).
Code
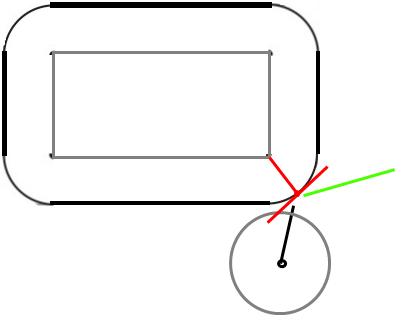
The example does what is described above in the function doBatBall(bat, ball) The ball has some gravity and will bounce off of the sides of the canvas. The bat is moved via the mouse. The bats movement will be transferred to the ball, but the bat will not feel any force from the ball.
const ctx = canvas.getContext("2d");
const mouse = {x : 0, y : 0, button : false}
function mouseEvents(e){
mouse.x = e.pageX;
mouse.y = e.pageY;
mouse.button = e.type === "mousedown" ? true : e.type === "mouseup" ? false : mouse.button;
}
["down","up","move"].forEach(name => document.addEventListener("mouse" + name, mouseEvents));
// short cut vars
var w = canvas.width;
var h = canvas.height;
var cw = w / 2; // center
var ch = h / 2;
const gravity = 1;
// constants and helpers
const PI2 = Math.PI * 2;
const setStyle = (ctx,style) => { Object.keys(style).forEach(key=> ctx[key] = style[key] ) };
// the ball
const ball = {
r : 50,
x : 50,
y : 50,
dx : 0.2,
dy : 0.2,
maxSpeed : 8,
style : {
lineWidth : 12,
strokeStyle : "green",
},
draw(ctx){
setStyle(ctx,this.style);
ctx.beginPath();
ctx.arc(this.x,this.y,this.r-this.style.lineWidth * 0.45,0,PI2);
ctx.stroke();
},
update(){
this.dy += gravity;
var speed = Math.sqrt(this.dx * this.dx + this.dy * this.dy);
var x = this.x + this.dx;
var y = this.y + this.dy;
if(y > canvas.height - this.r){
y = (canvas.height - this.r) - (y - (canvas.height - this.r));
this.dy = -this.dy;
}
if(y < this.r){
y = this.r - (y - this.r);
this.dy = -this.dy;
}
if(x > canvas.width - this.r){
x = (canvas.width - this.r) - (x - (canvas.width - this.r));
this.dx = -this.dx;
}
if(x < this.r){
x = this.r - (x - this.r);
this.dx = -this.dx;
}
this.x = x;
this.y = y;
if(speed > this.maxSpeed){ // if over speed then slow the ball down gradualy
var reduceSpeed = this.maxSpeed + (speed-this.maxSpeed) * 0.9; // reduce speed if over max speed
this.dx = (this.dx / speed) * reduceSpeed;
this.dy = (this.dy / speed) * reduceSpeed;
}
}
}
const ballShadow = { // this is used to do calcs that may be dumped
r : 50,
x : 50,
y : 50,
dx : 0.2,
dy : 0.2,
}
// Creates the bat
const bat = {
x : 100,
y : 250,
dx : 0,
dy : 0,
width : 140,
height : 10,
style : {
lineWidth : 2,
strokeStyle : "black",
},
draw(ctx){
setStyle(ctx,this.style);
ctx.strokeRect(this.x - this.width / 2,this.y - this.height / 2, this.width, this.height);
},
update(){
this.dx = mouse.x - this.x;
this.dy = mouse.y - this.y;
var x = this.x + this.dx;
var y = this.y + this.dy;
x < this.width / 2 && (x = this.width / 2);
y < this.height / 2 && (y = this.height / 2);
x > canvas.width - this.width / 2 && (x = canvas.width - this.width / 2);
y > canvas.height - this.height / 2 && (y = canvas.height - this.height / 2);
this.dx = x - this.x;
this.dy = y - this.y;
this.x = x;
this.y = y;
}
}
//=============================================================================
// THE FUNCTION THAT DOES THE BALL BAT sim.
// the ball and bat are at new position
function doBatBall(bat,ball){
var mirrorX = 1;
var mirrorY = 1;
const s = ballShadow; // alias
s.x = ball.x;
s.y = ball.y;
s.dx = ball.dx;
s.dy = ball.dy;
s.x -= s.dx;
s.y -= s.dy;
// get the bat half width height
const batW2 = bat.width / 2;
const batH2 = bat.height / 2;
// and bat size plus radius of ball
var batH = batH2 + ball.r;
var batW = batW2 + ball.r;
// set ball position relative to bats last pos
s.x -= bat.x;
s.y -= bat.y;
// set ball delta relative to bat
s.dx -= bat.dx;
s.dy -= bat.dy;
// mirror x and or y if needed
if(s.x < 0){
mirrorX = -1;
s.x = -s.x;
s.dx = -s.dx;
}
if(s.y < 0){
mirrorY = -1;
s.y = -s.y;
s.dy = -s.dy;
}
// bat now only has a bottom, right sides and bottom right corner
var distY = (batH - s.y); // distance from bottom
var distX = (batW - s.x); // distance from right
if(s.dx > 0 && s.dy > 0){ return }// ball moving away so no hit
var ballSpeed = Math.sqrt(s.dx * s.dx + s.dy * s.dy); // get ball speed relative to bat
// get x location of intercept for bottom of bat
var bottomX = s.x +(s.dx / s.dy) * distY;
// get y location of intercept for right of bat
var rightY = s.y +(s.dy / s.dx) * distX;
// get distance to bottom and right intercepts
var distB = Math.hypot(bottomX - s.x, batH - s.y);
var distR = Math.hypot(batW - s.x, rightY - s.y);
var hit = false;
if(s.dy < 0 && bottomX <= batW2 && distB <= ballSpeed && distB < distR){ // if hit is on bottom and bottom hit is closest
hit = true;
s.y = batH - s.dy * ((ballSpeed - distB) / ballSpeed);
s.dy = -s.dy;
}
if(! hit && s.dx < 0 && rightY <= batH2 && distR <= ballSpeed && distR <= distB){ // if hit is on right and right hit is closest
hit = true;
s.x = batW - s.dx * ((ballSpeed - distR) / ballSpeed);;
s.dx = -s.dx;
}
if(!hit){ // if no hit may have intercepted the corner.
// find the distance that the corner is from the line segment from the balls pos to the next pos
const u = ((batW2 - s.x) * s.dx + (batH2 - s.y) * s.dy)/(ballSpeed * ballSpeed);
// get the closest point on the line to the corner
var cpx = s.x + s.dx * u;
var cpy = s.y + s.dy * u;
// get ball radius squared
const radSqr = ball.r * ball.r;
// get the distance of that point from the corner squared
const dist = (cpx - batW2) * (cpx - batW2) + (cpy - batH2) * (cpy - batH2);
// is that distance greater than ball radius
if(dist > radSqr){ return } // no hit
// solves the triangle from center to closest point on balls trajectory
var d = Math.sqrt(radSqr - dist) / ballSpeed;
// intercept point is closest to line start
cpx -= s.dx * d;
cpy -= s.dy * d;
// get the distance from the ball current pos to the intercept point
d = Math.hypot(cpx - s.x,cpy - s.y);
// is the distance greater than the ball speed then its a miss
if(d > ballSpeed){ return } // no hit return
s.x = cpx; // position of contact
s.y = cpy;
// find the normalised tangent at intercept point
const ty = (cpx - batW2) / ball.r;
const tx = -(cpy - batH2) / ball.r;
// calculate the reflection vector
const bsx = s.dx / ballSpeed; // normalise ball speed
const bsy = s.dy / ballSpeed;
const dot = (bsx * tx + bsy * ty) * 2;
// get the distance the ball travels past the intercept
d = ballSpeed - d;
// the reflected vector is the balls new delta (this delta is normalised)
s.dx = (tx * dot - bsx);
s.dy = (ty * dot - bsy);
// move the ball the remaining distance away from corner
s.x += s.dx * d;
s.y += s.dy * d;
// set the ball delta to the balls speed
s.dx *= ballSpeed;
s.dy *= ballSpeed;
hit = true;
}
// if the ball hit the bat restore absolute position
if(hit){
// reverse mirror
s.x *= mirrorX;
s.dx *= mirrorX;
s.y *= mirrorY;
s.dy *= mirrorY;
// remove bat relative position
s.x += bat.x;
s.y += bat.y;
// remove bat relative delta
s.dx += bat.dx;
s.dy += bat.dy;
// set the balls new position and delta
ball.x = s.x;
ball.y = s.y;
ball.dx = s.dx;
ball.dy = s.dy;
}
}
// main update function
function update(timer){
if(w !== innerWidth || h !== innerHeight){
cw = (w = canvas.width = innerWidth) / 2;
ch = (h = canvas.height = innerHeight) / 2;
}
ctx.setTransform(1,0,0,1,0,0); // reset transform
ctx.globalAlpha = 1; // reset alpha
ctx.clearRect(0,0,w,h);
// move bat and ball
bat.update();
ball.update();
// check for bal bat contact and change ball position and trajectory if needed
doBatBall(bat,ball);
// draw ball and bat
bat.draw(ctx);
ball.draw(ctx);
requestAnimationFrame(update);
}
requestAnimationFrame(update);
canvas { position : absolute; top : 0px; left : 0px; }
body {font-family : arial; }
Use the mouse to move the bat and hit the ball.
<canvas id="canvas"></canvas>
Flaws with this method.
It is possible to trap the ball with the bat such that there is no valid solution, such as pressing the ball down onto the bottom of the screen. At some point the balls diameter is greater than the space between the wall and the bat. When this happens the solution will fail and the ball will pass through the bat.
In the demo there is every effort made to not loss energy, but over time floating point errors will accumulate, this can lead to a loss of energy if the sim is run without some input.
As the bat has infinite momentum it is easy to transfer a lot of energy to the ball, to prevent the ball accumulating to much momentum I have added a max speed to the ball. if the ball moves quicker than the max speed it is gradually slowed down until at or under the max speed.
On occasion if you move the bat away from the ball at the same speed, the extra acceleration due to gravity can result in the ball not being pushed away from the bat correctly.




rectobject you are using, but I have a feeling that in your calculation ofNearestY, you want the height rather than the width, likerect.hrather thanrect.w? – Willms