I'm having problems to read out the frame buffer of a camera using python. The camera (Xenics) is connected via USB and there is a dll which ships with the camera. I access this dll using ctypes. The code I am using is mainly inspired by a python module for lantz (lantz_drivers_xenics).
The dll provides the function XC_CopyFrameBuffer which I am using to copy the framebuffer to a numpy array.
While in principle the acquisition works fine, the trouble is to continuously read the framebuffer at moderate or high speed.
The compiled software that ships with the camera is able to read out the camera at 24 fps. In my program I would like to read the framebuffer at something between 5 and 25 fps. However, I cannot reach this value, because the time it takes to call the XC_CopyFrameBuffer function varies between 0 and ~0.5 seconds; it is mostly low, but 0.5 seconds for roughly every third frame or so.
My real program is more complex, uses threads and processes the acqired images. But I have boiled down the code to a minimal example that reproduces the problem and that I have attached. It's text and graphical output are shown below. My question is:
- Has anyone experienced similar issues with cameras?
- Has anyone used a Xenics camera, connected to it via ctypes in python and could provide a working example of that?
- Is there some apparent or hidden problem in the way I (and/or the lantz_drivers_xenics) uses the dll?
This is the code I am using:
import time
import ctypes
import threading
import numpy as np
from numpy.ctypeslib import ndpointer
calibration_file = r"C:\Path\to\some\calibrationfile.xca"
dll = "C:\\Programme\\X-Control\\xcamera.dll"
lib = ctypes.WinDLL(dll) #for xcamera we need ctypes.WinDLL
exposure_time = 300 #microseconds (us)
readlock = threading.Lock()
#add types
lib.XC_OpenCamera.argtypes = [ctypes.c_uint]
lib.XC_CloseCamera.argtypes = [ctypes.c_uint]
lib.XC_IsInitialised.argtypes = [ctypes.c_uint]
lib.XC_LoadFromFile.argtypes = [ctypes.c_uint, ctypes.c_char_p]
lib.XC_LoadCalibrationPack.argtypes = [ctypes.c_uint, ctypes.c_char_p]
lib.XC_SetGainCamera.argtypes = [ctypes.c_uint, ctypes.c_double]
lib.XC_SetIntegrationTime.argtypes = [ctypes.c_uint, ctypes.c_ulong]
lib.XC_SetFan.argtypes = [ctypes.c_uint, ctypes.c_bool]
lib.XC_StartCapture.argtypes = [ctypes.c_uint]
lib.XC_StopCapture.argtypes = [ctypes.c_uint]
lib.XC_GetFrameSizeInBytes.argtypes = [ctypes.c_uint]
lib.XC_CloseCamera.restype = ctypes.c_void_p
lib.XC_StopCapture.restype = ctypes.c_void_p
xcamera_id = lib.XC_OpenCamera(0)
#lib.XC_LoadFromFile(xcamera_id, self.config_file)
lib.XC_LoadCalibrationPack(xcamera_id, calibration_file)
height = lib.XC_GetHeight(xcamera_id)
width = lib.XC_GetWidth(xcamera_id)
shape = (height, width)
lib.XC_CopyFrameBuffer.argtypes = [ctypes.c_uint, ndpointer(dtype=np.uint16, shape=shape),ctypes.c_uint]
frame_size = lib.XC_GetFrameSizeInBytes(xcamera_id)
fbuffer = np.zeros(shape=shape, dtype=np.uint16)
lib.XC_SetIntegrationTime(xcamera_id, exposure_time)
lib.XC_SetFan(xcamera_id, True)
lib.XC_StartCapture(xcamera_id)
times = []
for i in range(150):
time.sleep( exposure_time/1000000. ) # 1./25
if readlock.acquire() :
start_time = time.time()
(lib.XC_CopyFrameBuffer(xcamera_id, fbuffer, frame_size) )
#time.sleep(0.0002)
now = time.time()
readlock.release()
print "Frame {nr}\ttime: {time}".format(time=now-start_time, nr=i)
times.append(now-start_time)
else:
time.sleep(0.001)
print "Try again" #This gets never printed, so readlock works fine.
###### CLOSING ###########
lib.XC_StopCapture(xcamera_id)
lib.XC_SetFan(xcamera_id, False)
lib.XC_CloseCamera(xcamera_id)
###### Plot ###########
import matplotlib.pyplot as plt
fig = plt.figure()
ax = fig.add_subplot(121)
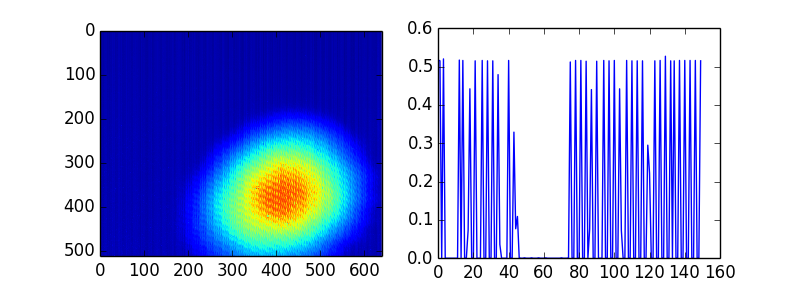
ax.imshow(fbuffer, interpolation="none")
ax2 = fig.add_subplot(122)
ax2.plot(times)
plt.savefig("testing/readout.png")
plt.show()
A typical output looks something like this, where time is the time it takes to copy the frame buffer.
Frame 72 time: 0.0
Frame 73 time: 0.0
Frame 74 time: 0.000999927520752
Frame 75 time: 0.512000083923
Frame 76 time: 0.000999927520752
Frame 77 time: 0.0
Frame 78 time: 0.516000032425
Frame 79 time: 0.0
Frame 80 time: 0.000999927520752
Frame 81 time: 0.516000032425
Frame 82 time: 0.0
Frame 83 time: 0.0
Frame 84 time: 0.514000177383
Frame 85 time: 0.0
Frame 86 time: 0.0759999752045
And the graph plotted is this (where the image looks exactly like it's supposed to). The right graph shows the time in seconds for each frame
Comments:
- I am working in python 2.7
- I played around with some of the parameters:
- Adding
time.sleep(x)with different values for x at different positions in the loop has the effect of increasing the number of frames which take 0.5s to read. The longer the sleep time, the more long frame reads. - Ommiting
time.sleep( exposure_time/1000000. )provides empty frames. - The problem is independent of whether I use
readlock.acquire()or not. - The problem is independent of the number of loops.
- Adding
v4l2-ctl -d 0 -l. My hunch is you would still need the dll for the calibration.) – McmastersGILof python, as suggested in the documentation: "The Python global interpreter lock is released before calling any function exported by the libraries, and reacquired afterwards." – Jabiru