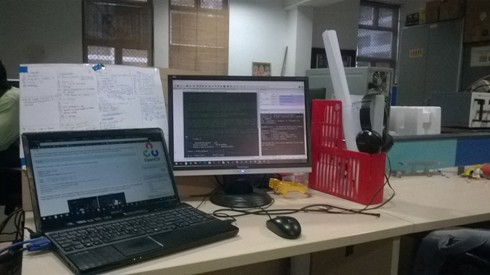
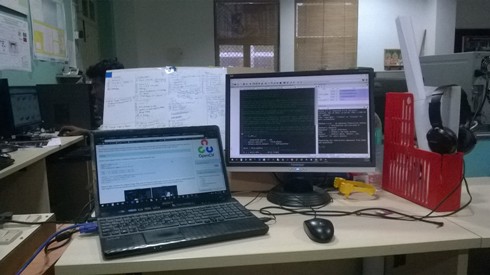
I was implementing the depth map construction, code of which (in Python) is available here OpenCv Docs - depthMap I was successful in getting the depth map as they showed in the doc for their given images-pair (left and right stereo images) tsukuba_l.png and tsukuba_2.png. I considered testing my own image pairs, so I took from my mobile a pair of images, as shown below:
When I run the code, I'm getting the depth map something like this
I tried playing with numDisparities and blocksize, but it didn't help in getting the best map.
I thought of checking the script of cv2.StereoBM_create in its master folder in Github, but couldn't get that online. Can you help me with a way to implement depth maps for custom images taken by me? is there a way that we can play with the parameters or at least get me the link to GitHub master module that has all Stereo related modules. Thank you.