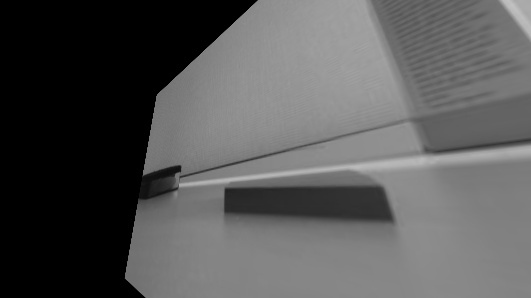
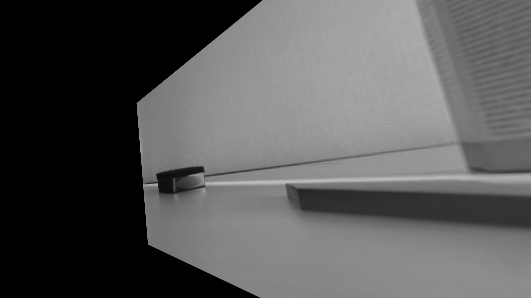
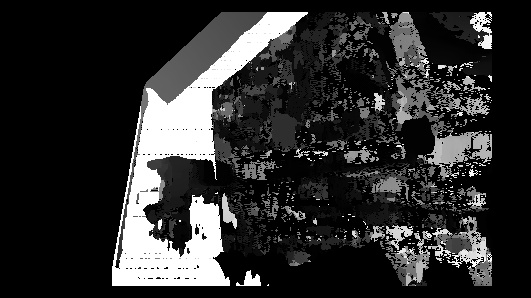
I am trying to use StereoBM to get disparity map of two images. I tried some sample code and images. They are working fine. However, when I try my own images, I got very bad map, very noisy.


my StereoBM parameters
sbm.state->SADWindowSize = 25;
sbm.state->numberOfDisparities = 128;
sbm.state->preFilterSize = 5;
sbm.state->preFilterCap = 61;
sbm.state->minDisparity = -39;
sbm.state->textureThreshold = 507;
sbm.state->uniquenessRatio = 0;
sbm.state->speckleWindowSize = 0;
sbm.state->speckleRange = 8;
sbm.state->disp12MaxDiff = 1;
My questions are
- Any problems about my images?
- Is possible to get good disparity map without calibration of camera? Do I need to rectify images before StereoBM
Thanks.
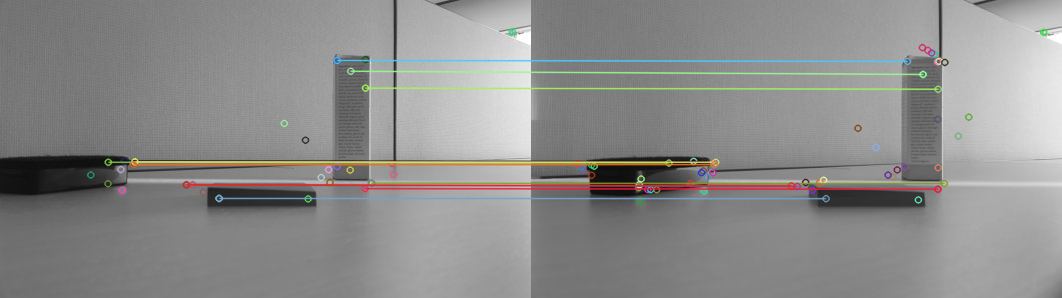
Here is my code for rectifying image
Mat img_1 = imread( "image1.jpg", CV_LOAD_IMAGE_GRAYSCALE );
Mat img_2 = imread( "image2.jpg", CV_LOAD_IMAGE_GRAYSCALE );
int minHessian = 430;
SurfFeatureDetector detector( minHessian );
std::vector<KeyPoint> keypoints_1, keypoints_2;
detector.detect( img_1, keypoints_1 );
detector.detect( img_2, keypoints_2 );
//-- Step 2: Calculate descriptors (feature vectors)
SurfDescriptorExtractor extractor;
Mat descriptors_1, descriptors_2;
extractor.compute( img_1, keypoints_1, descriptors_1 );
extractor.compute( img_2, keypoints_2, descriptors_2 );
//-- Step 3: Matching descriptor vectors with a brute force matcher
BFMatcher matcher(NORM_L1, true); //BFMatcher matcher(NORM_L2);
std::vector< DMatch > matches;
matcher.match( descriptors_1, descriptors_2, matches );
double max_dist = 0; double min_dist = 100;
//-- Quick calculation of max and min distances between keypoints
for( int i = 0; i < matches.size(); i++ )
{ double dist = matches[i].distance;
if( dist < min_dist ) min_dist = dist;
if( dist > max_dist ) max_dist = dist;
}
std::vector< DMatch > good_matches;
vector<Point2f>imgpts1,imgpts2;
for( int i = 0; i < matches.size(); i++ )
{
if( matches[i].distance <= max(4.5*min_dist, 0.02) ){
good_matches.push_back( matches[i]);
imgpts1.push_back(keypoints_1[matches[i].queryIdx].pt);
imgpts2.push_back(keypoints_2[matches[i].trainIdx].pt);
}
}
std::vector<uchar> status;
cv::Mat F = cv::findFundamentalMat(imgpts1, imgpts2, cv::FM_8POINT, 3., 0.99, status); //FM_RANSAC
Mat H1,H2;
cv::stereoRectifyUncalibrated(imgpts1, imgpts1, F, img_1.size(), H1, H2);
cv::Mat rectified1(img_1.size(), img_1.type());
cv::warpPerspective(img_1, rectified1, H1, img_1.size());
cv::Mat rectified2(img_2.size(), img_2.type());
cv::warpPerspective(img_2, rectified2, H2, img_2.size());
StereoBM sbm;
sbm.state->SADWindowSize = 25;
sbm.state->numberOfDisparities = 128;
sbm.state->preFilterSize = 5;
sbm.state->preFilterCap = 61;
sbm.state->minDisparity = -39;
sbm.state->textureThreshold = 507;
sbm.state->uniquenessRatio = 0;
sbm.state->speckleWindowSize = 0;
sbm.state->speckleRange = 8;
sbm.state->disp12MaxDiff = 1;
Mat disp,disp8;
sbm(rectified1, rectified2, disp);
the rectified images and disparity map are here