I am trying to match SIFT features between two images which I have detected using OpenCV:
sift = cv2.xfeatures2d.SIFT_create()
kp, desc = sift.detectAndCompute(img, None)
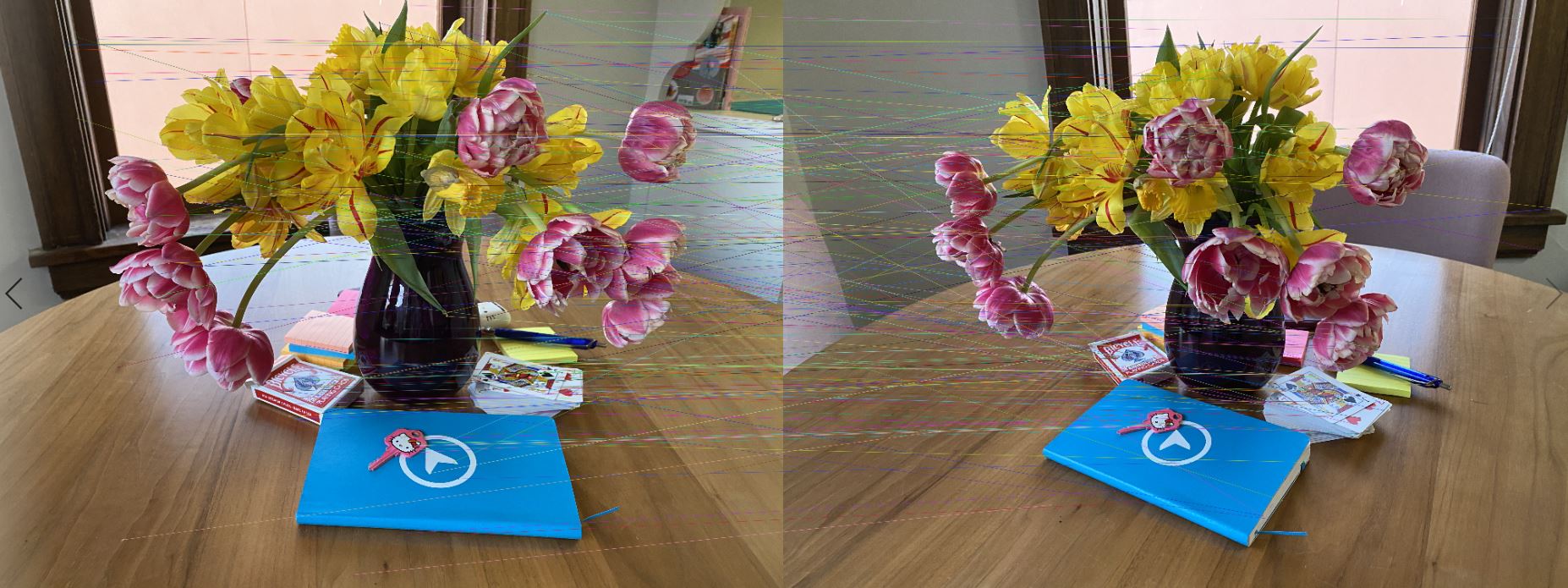
The images both seem to contains lots of features, around 15,000 each, shown with the green dots.


But after matching them I only retain 87 and some are outliers.

I'm trying to figure out if I'm doing something wrong. My code for matching the two images is:
def match(this_filename, this_desc, this_kp, othr_filename, othr_desc, othr_kp):
E_RANSAC_PROB = 0.999
F_RANSAC_PROB = 0.999
E_PROJ_ERROR = 15.0
F_PROJ_ERROR = 15.0
LOWE_RATIO = 0.9
# FLANN Matcher
# FLANN_INDEX_KDTREE = 1 # 1? https://opencv-python-tutroals.readthedocs.io/en/latest/py_tutorials/py_feature2d/py_matcher/py_matcher.html#basics-of-brute-force-matcher
# index_params = dict(algorithm = FLANN_INDEX_KDTREE, trees = 5)
# search_params = dict(checks=50) # or pass empty dictionary
# flann = cv2.FlannBasedMatcher(index_params, search_params)
# matcherij = flann.knnMatch(this_desc, othr_desc, k=2)
# matcherji = flann.knnMatch(othr_desc, this_desc, k=2)
# BF Matcher
this_matches = {}
othr_matches = {}
bf = cv2.BFMatcher()
matcherij = bf.knnMatch(this_desc, othr_desc, k=2)
matcherji = bf.knnMatch(othr_desc, this_desc, k=2)
matchesij = []
matchesji = []
for i,(m,n) in enumerate(matcherij):
if m.distance < LOWE_RATIO*n.distance:
matchesij.append((m.queryIdx, m.trainIdx))
for i,(m,n) in enumerate(matcherji):
if m.distance < LOWE_RATIO*n.distance:
matchesji.append((m.trainIdx, m.queryIdx))
# Make sure matches are symmetric
symmetric = set(matchesij).intersection(set(matchesji))
symmetric = list(symmetric)
this_matches[othr_filename] = [ (a, b) for (a, b) in symmetric ]
othr_matches[this_filename] = [ (b, a) for (a, b) in symmetric ]
src = np.array([ this_kp[index[0]].pt for index in this_matches[othr_filename] ])
dst = np.array([ othr_kp[index[1]].pt for index in this_matches[othr_filename] ])
if len(this_matches[othr_filename]) == 0:
print("no symmetric matches")
return 0
# retain inliers that fit x.F.xT == 0
F, inliers = cv2.findFundamentalMat(src, dst, cv2.FM_RANSAC, F_PROJ_ERROR, F_RANSAC_PROB)
if F is None or inliers is None:
print("no F matrix estimated")
return 0
inliers = inliers.ravel()
this_matches[othr_filename] = [ this_matches[othr_filename][x] for x in range(len(inliers)) if inliers[x] ]
othr_matches[this_filename] = [ othr_matches[this_filename][x] for x in range(len(inliers)) if inliers[x] ]
return this_matches, othr_matches, inliers.sum()
Here are the two original images: https://www.dropbox.com/s/pvi247be2ds0noc/images.zip?dl=0