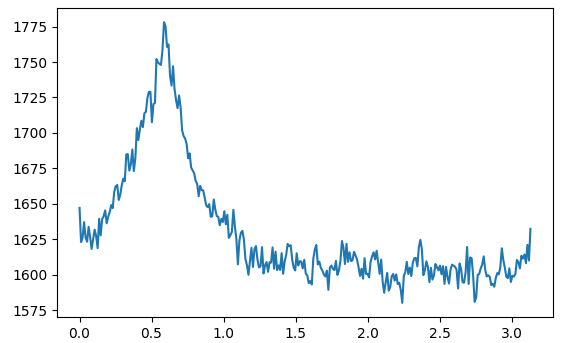
I have this image for a treeline crop. I need to find the general direction in which the crop is aligned. I'm trying to get the Hough lines of the image, and then find the mode of distribution of angles.
I've been following this tutorialon crop lines, however in that one, the crop lines are sparse. Here they are densely pack, and after grayscaling, blurring, and using canny edge detection, this is what i get
import cv2
import numpy as np
import matplotlib.pyplot as plt
img = cv2.imread('drive/MyDrive/tree/sample.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_RGB2GRAY)
gauss = cv2.GaussianBlur(gray, (3,3), 3)
plt.figure(figsize=(15,15))
plt.subplot(1,2,1)
plt.imshow(gauss)
gscale = cv2.Canny(gauss, 80, 140)
plt.subplot(1,2,2)
plt.imshow(gscale)
plt.show()
(Left side blurred image without canny, left one preprocessed with canny)

After that, I followed the tutorial and "skeletonized" the preprocessed image
size = np.size(gscale)
skel = np.zeros(gscale.shape, np.uint8)
ret, gscale = cv2.threshold(gscale, 128, 255,0)
element = cv2.getStructuringElement(cv2.MORPH_CROSS, (3,3))
done = False
while not done:
eroded = cv2.erode(gscale, element)
temp = cv2.dilate(eroded, element)
temp = cv2.subtract(gscale, temp)
skel = cv2.bitwise_or(skel, temp)
gscale = eroded.copy()
zeros = size - cv2.countNonZero(gscale)
if zeros==size:
done = True
Giving me

As you can see, there are a bunch of curvy lines still. When using the HoughLines algorithm on it, there are 11k lines scattered everywhere
lines = cv2.HoughLinesP(skel,1,np.pi/180,130)
a,b,c = lines.shape
for i in range(a):
rho = lines[i][0][0]
theta = lines[i][0][1]
a = np.cos(theta)
b = np.sin(theta)
x0 = a*rho
y0 = b*rho
x1 = int(x0 + 1000*(-b))
y1 = int(y0 + 1000*(a))
x2 = int(x0 - 1000*(-b))
y2 = int(y0 - 1000*(a))
cv2.line(img,(x1,y1),(x2,y2),(0,0,255),2, cv2.LINE_AA)#showing the results:
plt.figure(figsize=(15,15))
plt.subplot(121)#OpenCV reads images as BGR, this corrects so it is displayed as RGB
plt.plot()
plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))
plt.title('Row Detection')
plt.xticks([])
plt.yticks([])
plt.subplot(122)
plt.plot()
plt.imshow(skel,cmap='gray')
plt.title('Skeletal Image')
plt.xticks([])
plt.yticks([])
plt.show()
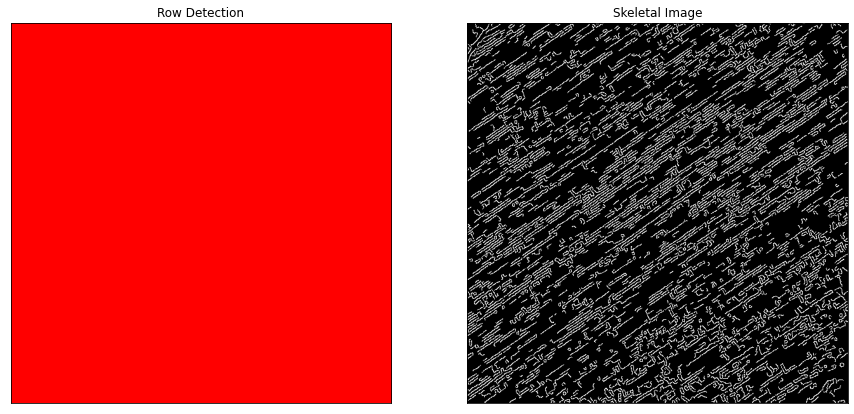
I am a newbie when it comes to cv2, so I have 0 clue what to do. Searched and tried a bunch of stuff but none works. How can I remove the mildly big dots, and remove the squiggly lines?