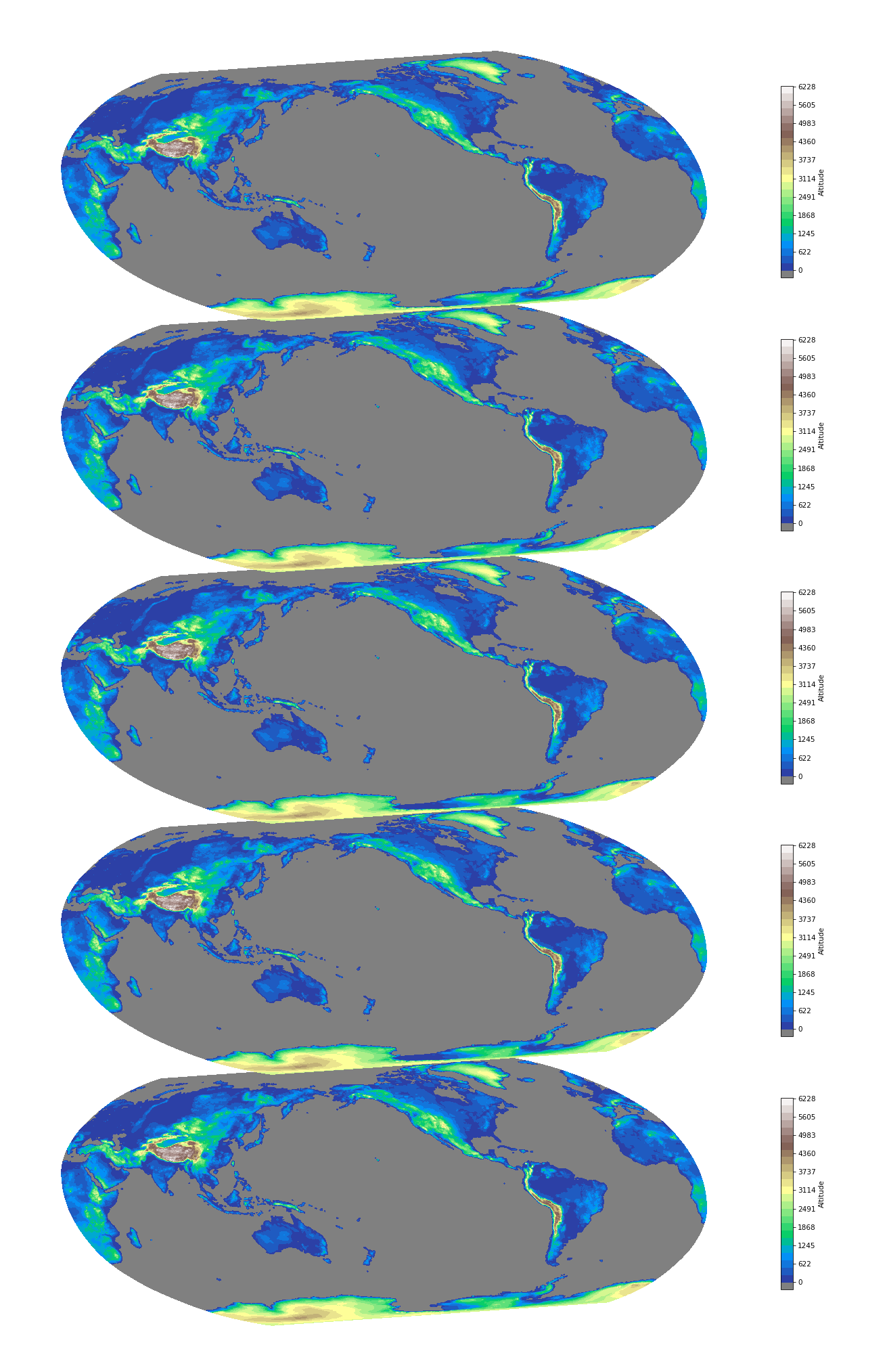
I am not an expert with Matplotlib, but I found a way to get a similar result by using the data files included in the source folder of basemap. They can be combined into a meshgrid to plot some data, in the example below we plot the altitude at every point.
One of the tricks I used is to set matplotlib to an orthogonal projection so that there is no distortion in the vertical spacing of the maps.
I have put the parameters at the beginning of the code as you may find it useful to adjust.
One thing I couldn't get my head around is the shadow under the maps.
from mpl_toolkits.mplot3d import proj3d
from mpl_toolkits.basemap import Basemap
from mpl_toolkits.axes_grid1.inset_locator import inset_axes
import numpy as np
import matplotlib.pyplot as plt
# Parameters
n_maps = 5 # Number of maps
z_spacing = 4. # Spacing of maps along z
z_reduction = 1E-8 # Reduction factor for Z data, makes the map look flat
view_angles = (14., -100.) # Set view port angles
colbar_bottom = 0.2 # Space at the bottom of colorbar column
colbar_spacing = .132 # Space between colorbars
colbar_height = 0.1 # Height of colorbars
# Set orthogonal projection
def orthogonal_proj(zfront, zback):
a = (zfront+zback)/(zfront-zback)
b = -2*(zfront*zback)/(zfront-zback)
return np.array([[1,0,0,0],
[0,1,0,0],
[0,0,a,b],
[0,0,-0.0001,zback]])
proj3d.persp_transformation = orthogonal_proj
fig = plt.figure(figsize=[30, 10*n_maps])
ax = fig.gca(projection='3d')
etopo = np.loadtxt('etopo20data.gz')
lons = np.loadtxt('etopo20lons.gz')
lats = np.loadtxt('etopo20lats.gz')
# Create Basemap instance for Robinson projection.
m = Basemap(projection='robin', lon_0=0.5*(lons[0]+lons[-1]))
# Compute map projection coordinates for lat/lon grid.
X, Y = m(*np.meshgrid(lons,lats))
# Exclude the oceans
Z = etopo.clip(-1)
# Set the colormap
cmap = plt.cm.get_cmap("terrain")
cmap.set_under("grey")
for i in range(n_maps):
c = ax.contourf(X, Y, z_spacing*i + z_reduction*Z, 30, cmap=cmap, vmin=z_spacing*i, extend='neither')
cax = inset_axes(ax,
width="5%",
height="100%",
loc=3,
bbox_to_anchor=(.85, colbar_spacing*i+colbar_bottom, .2, colbar_height),
bbox_transform=ax.transAxes,
borderpad=0
)
cb = fig.colorbar(c, cax=cax)
cb.set_label("Altitude")
# Reset the ticks of the color bar to match initial data
cb.set_ticks([z_spacing * i + j/10. * z_reduction * Z.max() for j in range(11)])
cb.set_ticklabels([str(int(j/10. * Z.max())) for j in range(11)])
ax.set_axis_off()
ax.view_init(*view_angles)
ax.set_xlim3d(X.min(), X.max())
ax.set_ylim3d(Y.min(), Y.max())
ax.set_zlim3d(-1E-2, (n_maps-1)*z_spacing)
plt.savefig('world.png',dpi=75)
![Result]()
Edit:
If you want shadows and don't mind the extra compute time you can change the beginning of the for loop with something along the lines of:
shadow_Z = np.empty(Z.shape)
for i in range(n_maps):
c = ax.contourf(X, Y, z_spacing*i + z_reduction*Z, 30, cmap=cmaps[i], vmin=z_spacing*i, extend='neither')
for j in range(10):
shadow_Z.fill(z_spacing*i - 1E-2 * j)
s = ax.contourf((X - X.mean()) * (1 + 8E-3 * j) + X.mean() + 2E5,
(Y - Y.mean()) * (1 + 8E-3 * j) + Y.mean() - 2E5,
shadow_Z, colors='black', alpha=0.1 - j * 1E-2)
Basemapsin one figure, usesubplots. If that is not what you are after, you need to tell us more about your actual problem. – Copenhagen