A standard approach to this task of finding the shortest path polyline (or geodesic) on the surface of triangular mesh between two given points consists of two steps:
- Find a path approximation between two points
- Iteratively adjust it to make it locally shortest everywhere.
The first step (path approximation) can be computed, for example, using
- Dijkstra algorithm, which considers only paths along mesh edges (no crossing of mesh triangles),
- Or some variations of Dijkstra algorithm, better suited for near planar surfaces like A*-search,
- Or it can be Fast marching method, which can find also the paths crossing the triangles, however not guaranteed to produce a geodesic line.
The next step is iterative adjustment of the approximate path till it becomes truly locally shortest. Some recent articles are really promising here, like Just Flipping Edges. But it requires to construct a path network from the original mesh before operating, so it can be really expensive if your task is just to find one shortest path on the mesh.
A more classical way is to consider every piece of current path approximation between it enters two consecutive vertices, and unfold the strip of crossed triangles on plane. Then find the shortest path in the planar strip, which is a task that can be solved exactly in a linear time, for example by Shortest Paths in Polygons method by Wolfgang Mulzer. The crossing of this line with the edges will give the shortest path on the mesh in between two vertices.
Then for every vertex on the path approximation, two walks around this vertex are evaluated using same unfolding in hope a path around will be shorter then the path exactly via the vertex. The last steps are repeated till convergence.
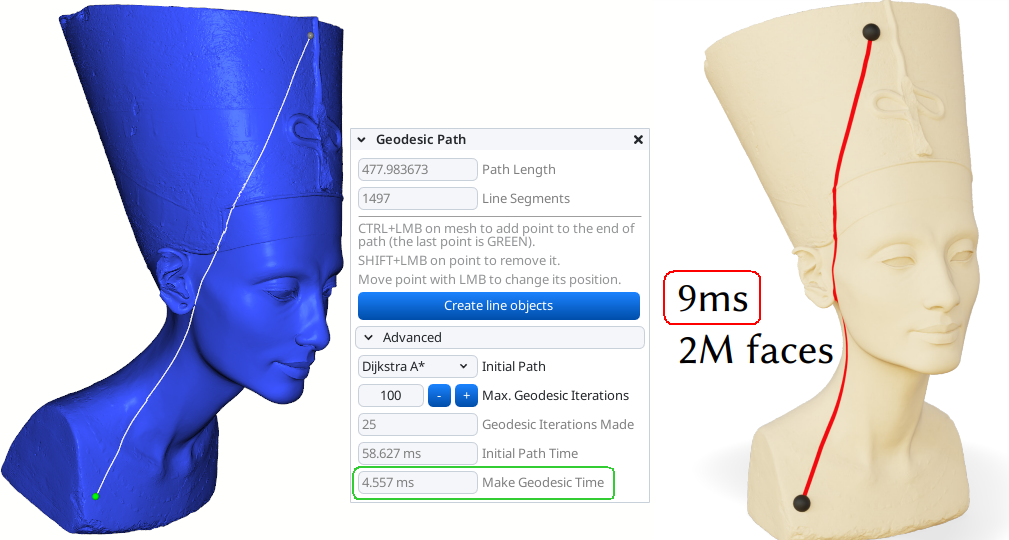
Below is an example of geodesic path on a mesh with 2 million triangles:
![Geodesic path construction]()
- Left - from the application MeshInspector: the time of iterative adjustment is highlighted in green and it is only a small fraction of total time.
- Right - the picture from Just Flipping Edges article, where total time is not given, but it is presumably even higher due to the necessity to construct path network from the mesh.