If you know the viewpoint from where each point was captured, it can be used to orient the normals.
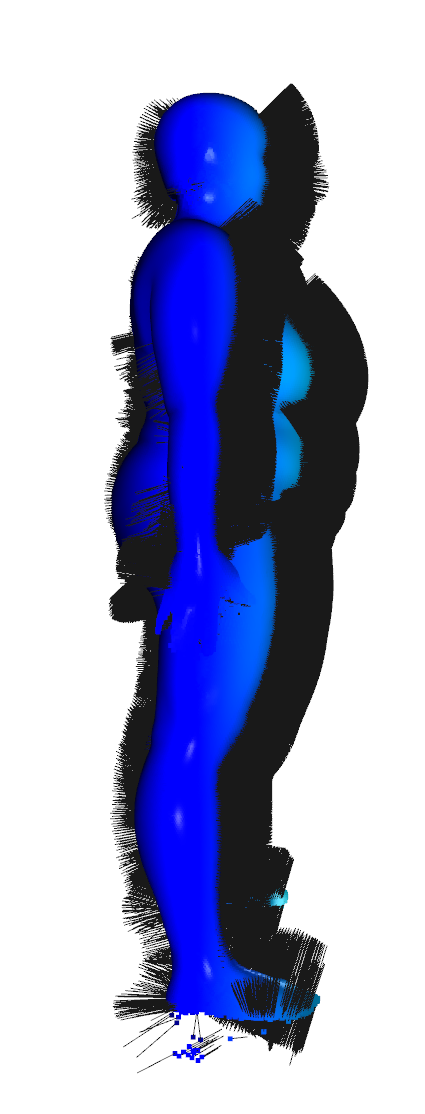
I assume that this not the case - so given your situation, which seems rather watertight and uniformly sampled, mesh reconstruction can help.
PCL library offers the ConcaveHull algorithm. Although simple, it should be enough to produce a single coherent mesh.
Once you have a mesh, each triangle defines a normal (the cross product). It is important to note that a mesh isn't just a collection of independent faces. The faces are connected and this connectivity enforces a coherent orientation across the mesh.
pcl::PolygonMesh is an "half edge data structure". This means that every triangle face is defined by an ordered set of vertices, which defines the orientation:
order of vertices => order of cross product => well defined unambiguous normals
You can either use the normals from the mesh (nearest neighbor), or calculate a low resolution mesh and just use it to orient the cloud.