I'm struggling to get the OpenCV triangulatePoints function to work. I'm using the function with point matches generated from optical flow. I'm using two consecutive frames/positions from a single moving camera.
Currently these are my steps:
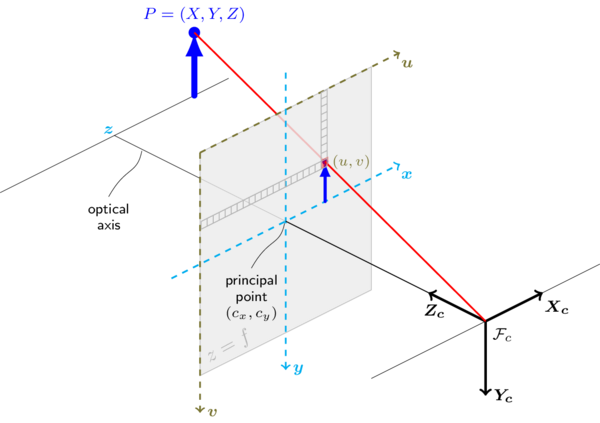
The intrinsics are given and look like one would expect:
2.6551e+003 0. 1.0379e+003
0. 2.6608e+003 5.5033e+002
0. 0. 1.
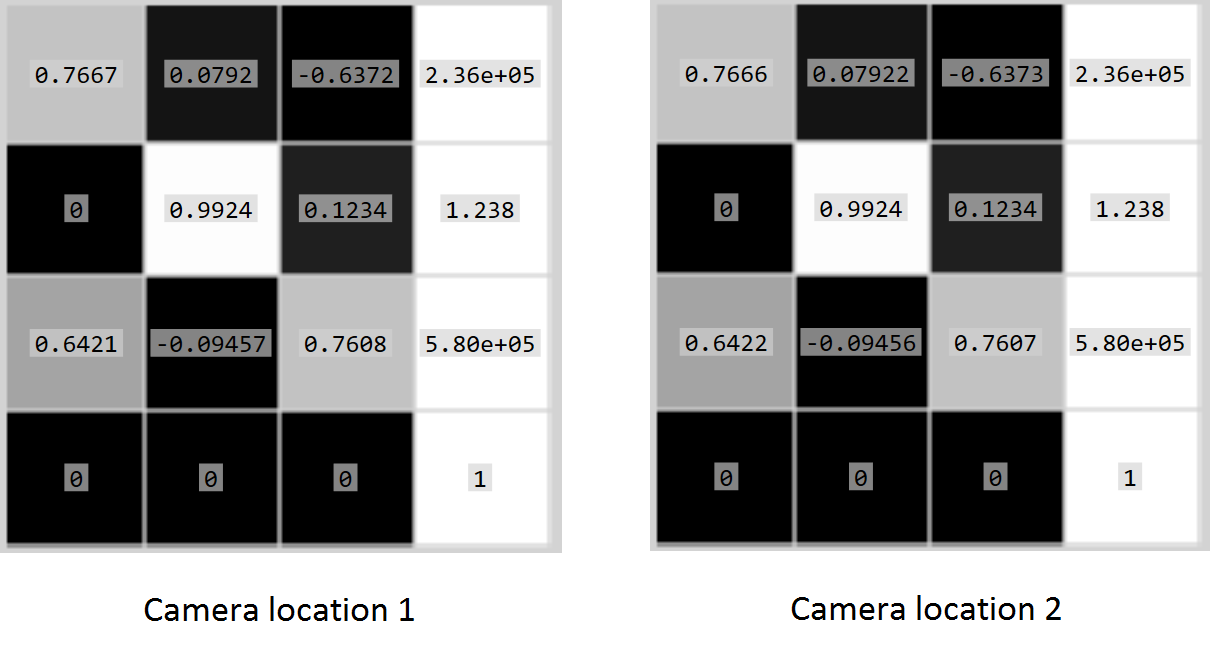
I then compute the two extrinsic matrices ([R|t]) based on (highly accurate) GPS and camera position relative to the GPS. Note that the GPS data uses a cartesian coordinate system around The Netherlands which uses meters as units (so no weird lat/lng math is required). This yields the following matrices:
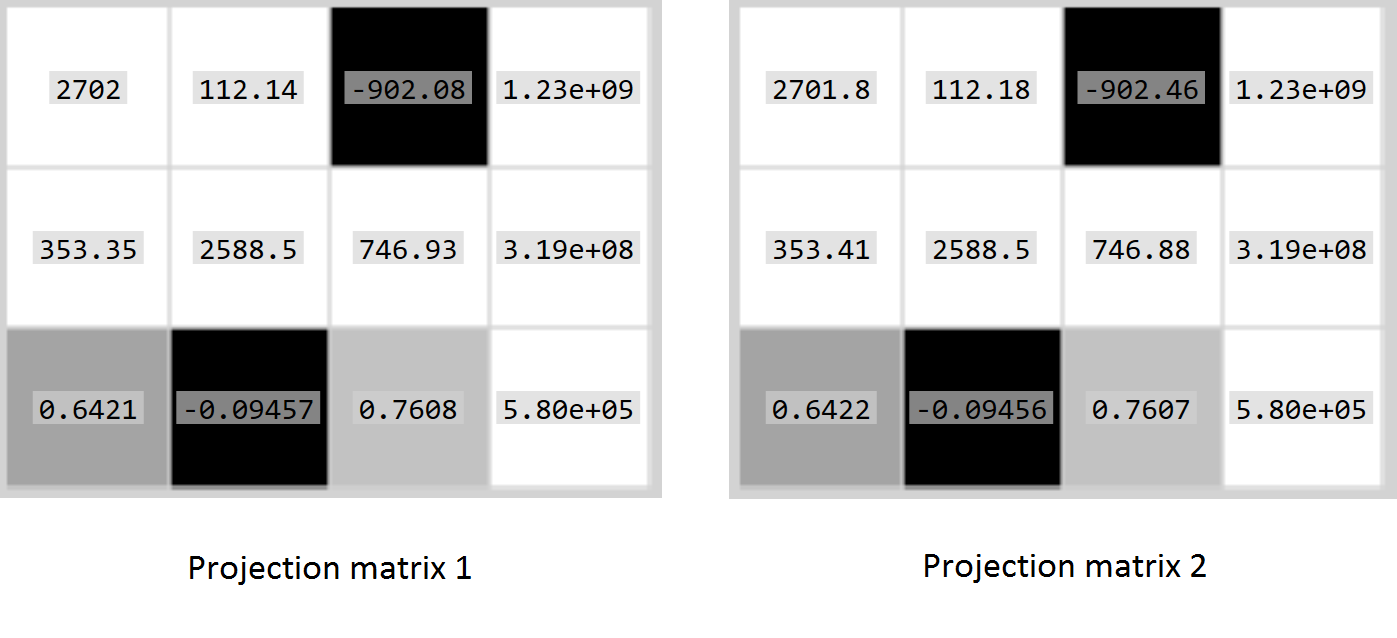
Next, I simply remove the bottom row of these matrices and multiply them with the intrinsic matrices to get the projection matrices:
projectionMat = intrinsics * extrinsics;
This results in:
My image points simply consist of all the pixel coordinates for the first set,
(0, 0)...(1080, 1920)
and all pixel coordinates + their computed optical flow for the second set.
(0 + flowY0, 0 + flowX0)...(1080 + flowYN, 1920 + flowXN)
To compute the 3D points, I feed the image points (in the format OpenCV expects) and projection matrices to the triangulatePoints function:
cv::triangulatePoints(projectionMat1, projectionMat2, imagePoints1, imagePoints2, outputPoints);
Finally, I convert the outputPoints from homogeneous coordinates by dividing them by their fourth coordinate (w) and removing this coordinate.
What I end up with is some weird cone-shaped point cloud:
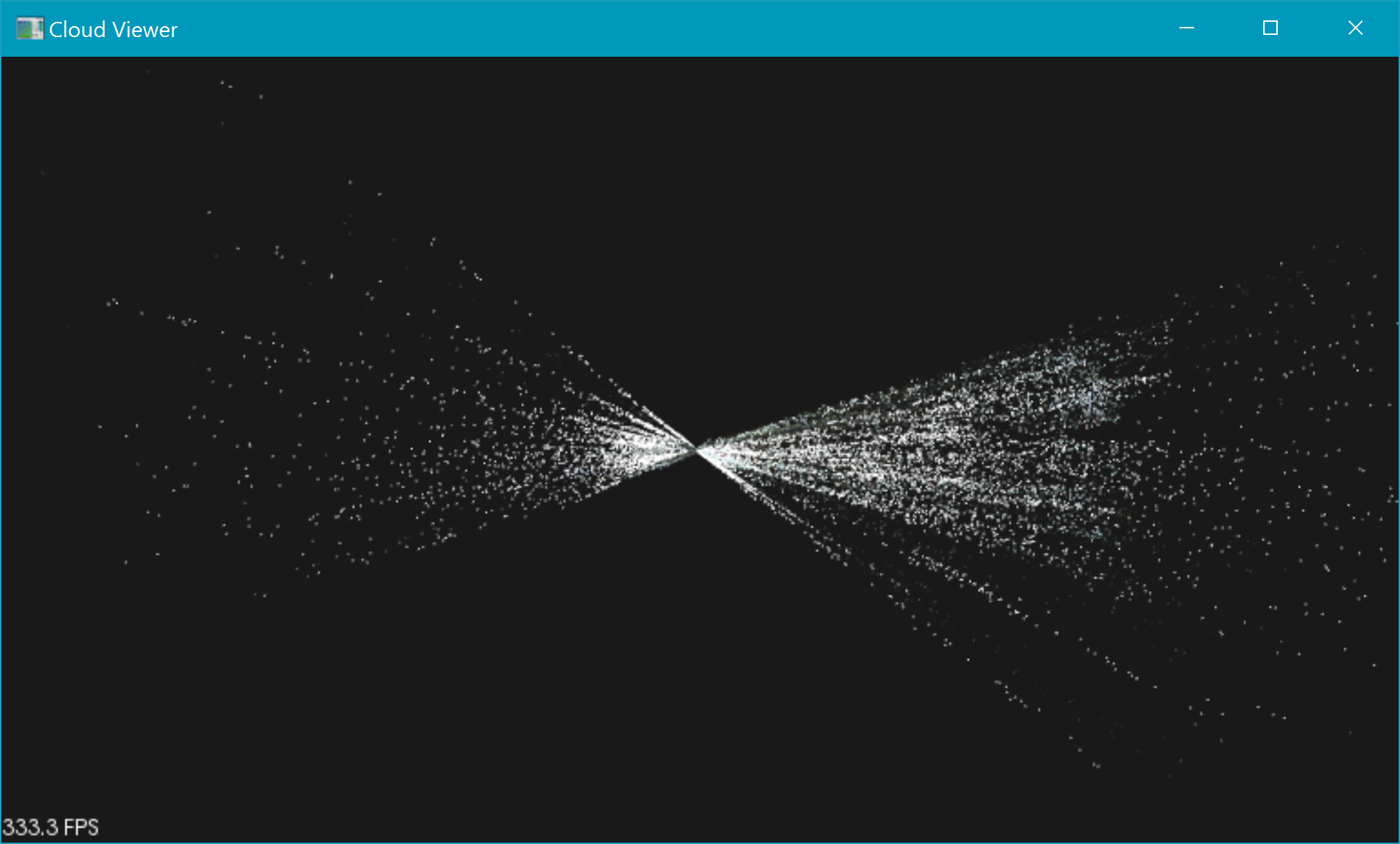
Now I've tried every combination of tweaks I could think of (inverting matrices, changing X/Y/Z order, inverting X/Y/Z axes, changing multiplication order...), but everything yields similarly strange results. The one thing that did give me better results was simply multiplying the optical flow values by 0.01. This results in the following point cloud:
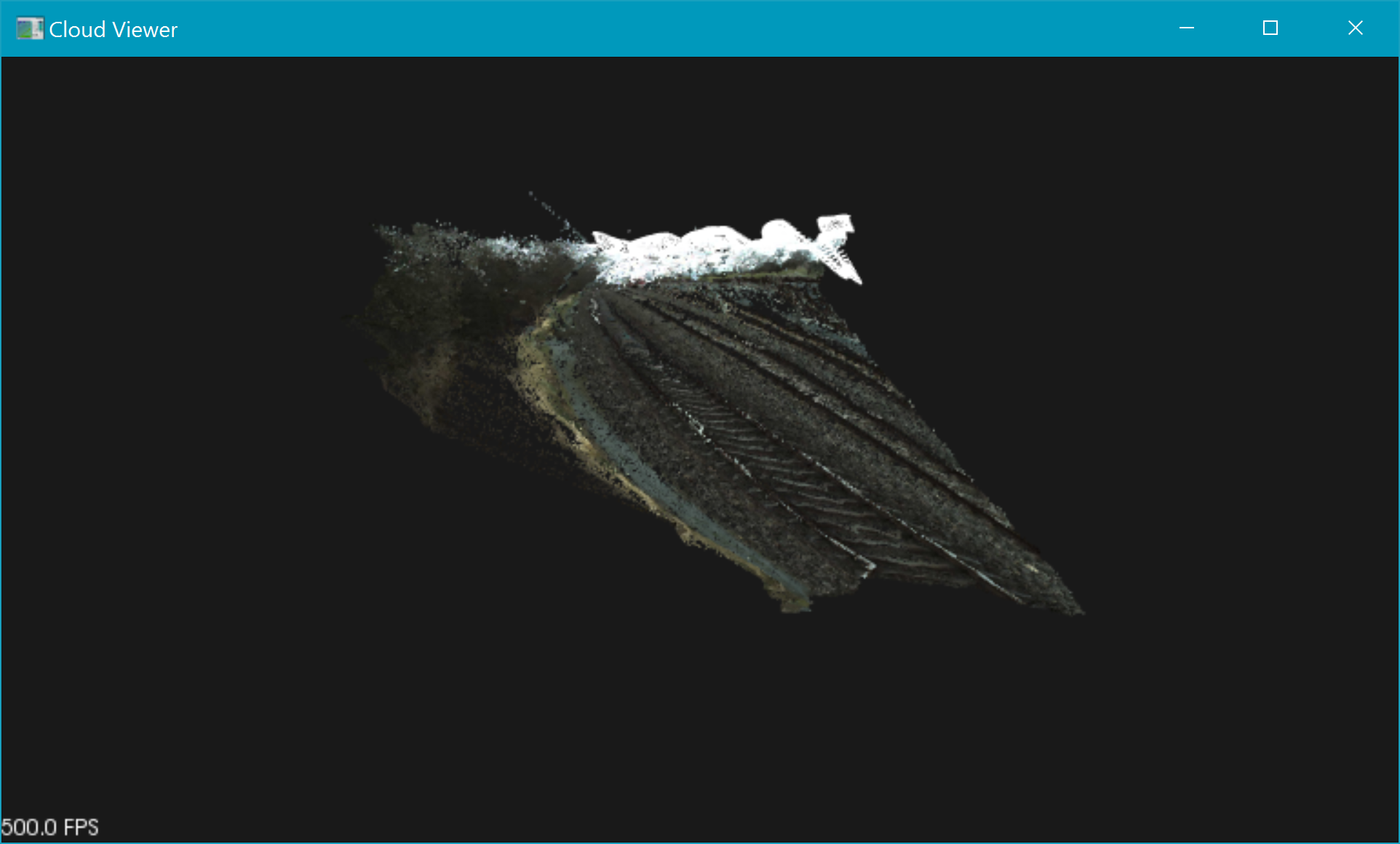
This is still not perfect (areas far away from the camera look really curved), but much more like I would expect.
I'm wondering if anybody can spot something I'm doing wrong. Do my matrices look ok? Is the output I'm getting related to a certain problem?
What I'm quite certain of, is that it's not related to the GPS or optical flow, since I've tested multiple frames and they all yield the same type of output. I really think it has to do with the triangulation itself.