I've been trying to rectify and build the disparity mappping for a pair of images using OpenCV stereoRectifyUncalibrated, but I'm not getting very good results. My code is:
template<class T>
T convertNumber(string& number)
{
istringstream ss(number);
T t;
ss >> t;
return t;
}
void readPoints(vector<Point2f>& points, string filename)
{
fstream filest(filename.c_str(), ios::in);
string line;
assert(filest != NULL);
getline(filest, line);
do{
int posEsp = line.find_first_of(' ');
string posX = line.substr(0, posEsp);
string posY = line.substr(posEsp+1, line.size() - posEsp);
float X = convertNumber<float>(posX);
float Y = convertNumber<float>(posY);
Point2f pnt = Point2f(X, Y);
points.push_back(pnt);
getline(filest, line);
}while(!filest.eof());
filest.close();
}
void drawKeypointSequence(Mat lFrame, Mat rFrame, vector<KeyPoint>& lKeyp, vector<KeyPoint>& rKeyp)
{
namedWindow("prevFrame", WINDOW_AUTOSIZE);
namedWindow("currFrame", WINDOW_AUTOSIZE);
moveWindow("prevFrame", 0, 300);
moveWindow("currFrame", 650, 300);
Mat rFrameAux;
rFrame.copyTo(rFrameAux);
Mat lFrameAux;
lFrame.copyTo(lFrameAux);
int size = rKeyp.size();
for(int i=0; i<size; i++)
{
vector<KeyPoint> drawRightKeyp;
vector<KeyPoint> drawleftKeyp;
drawRightKeyp.push_back(rKeyp[i]);
drawleftKeyp.push_back(lKeyp[i]);
cout << rKeyp[i].pt << " <<<>>> " << lKeyp[i].pt << endl;
drawKeypoints(rFrameAux, drawRightKeyp, rFrameAux, Scalar::all(255), DrawMatchesFlags::DRAW_OVER_OUTIMG);
drawKeypoints(lFrameAux, drawleftKeyp, lFrameAux, Scalar::all(255), DrawMatchesFlags::DRAW_OVER_OUTIMG);
imshow("currFrame", rFrameAux);
imshow("prevFrame", lFrameAux);
waitKey(0);
}
imwrite("RightKeypFrame.jpg", rFrameAux);
imwrite("LeftKeypFrame.jpg", lFrameAux);
}
int main(int argc, char* argv[])
{
StereoBM stereo(StereoBM::BASIC_PRESET, 16*5, 21);
double ndisp = 16*4;
assert(argc == 5);
string rightImgFilename(argv[1]); // Right image (current frame)
string leftImgFilename(argv[2]); // Left image (previous frame)
string rightPointsFilename(argv[3]); // Right image points file
string leftPointsFilename(argv[4]); // Left image points file
Mat rightFrame = imread(rightImgFilename.c_str(), 0);
Mat leftFrame = imread(leftImgFilename.c_str(), 0);
vector<Point2f> rightPoints;
vector<Point2f> leftPoints;
vector<KeyPoint> rightKeyp;
vector<KeyPoint> leftKeyp;
readPoints(rightPoints, rightPointsFilename);
readPoints(leftPoints, leftPointsFilename);
assert(rightPoints.size() == leftPoints.size());
KeyPoint::convert(rightPoints, rightKeyp);
KeyPoint::convert(leftPoints, leftKeyp);
// Desenha os keypoints sequencialmente, de forma a testar a consistência do matching
drawKeypointSequence(leftFrame, rightFrame, leftKeyp, rightKeyp);
Mat fundMatrix = findFundamentalMat(leftPoints, rightPoints, CV_FM_8POINT);
Mat homRight;
Mat homLeft;
Mat disp16 = Mat(rightFrame.rows, leftFrame.cols, CV_16S);
Mat disp8 = Mat(rightFrame.rows, leftFrame.cols, CV_8UC1);
stereoRectifyUncalibrated(leftPoints, rightPoints, fundMatrix, rightFrame.size(), homLeft, homRight);
warpPerspective(rightFrame, rightFrame, homRight, rightFrame.size());
warpPerspective(leftFrame, leftFrame, homLeft, leftFrame.size());
namedWindow("currFrame", WINDOW_AUTOSIZE);
namedWindow("prevFrame", WINDOW_AUTOSIZE);
moveWindow("currFrame", 650, 300);
moveWindow("prevFrame", 0, 300);
imshow("currFrame", rightFrame);
imshow("prevFrame", leftFrame);
imwrite("RectfRight.jpg", rightFrame);
imwrite("RectfLeft.jpg", leftFrame);
waitKey(0);
stereo(rightFrame, leftFrame, disp16, CV_16S);
disp16.convertTo(disp8, CV_8UC1, 255/ndisp);
FileStorage file("disp_map.xml", FileStorage::WRITE);
file << "disparity" << disp8;
file.release();
imshow("disparity", disp8);
imwrite("disparity.jpg", disp8);
moveWindow("disparity", 0, 0);
waitKey(0);
}
drawKeyPoint sequence is the way I visually check the consistency of the points I have for both images. By drawing each of their keypoints in sequence, I can be sure that keypoint i on image A is keypoint i on image B.
I've also tried playing with the ndisp parameter, but it didn't help much.
I tried it for the following pair of images:
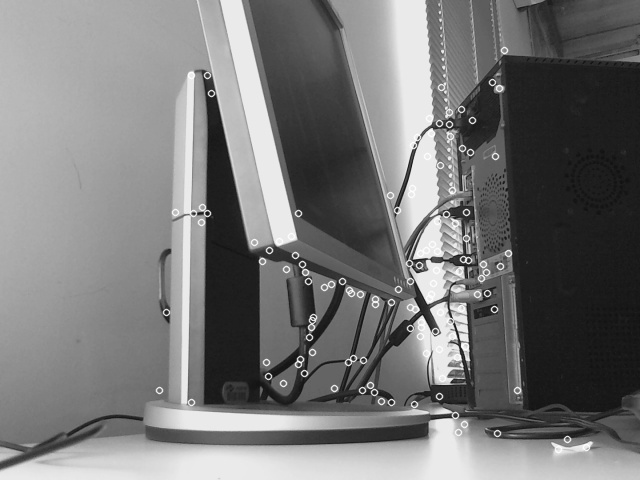{kind=link}
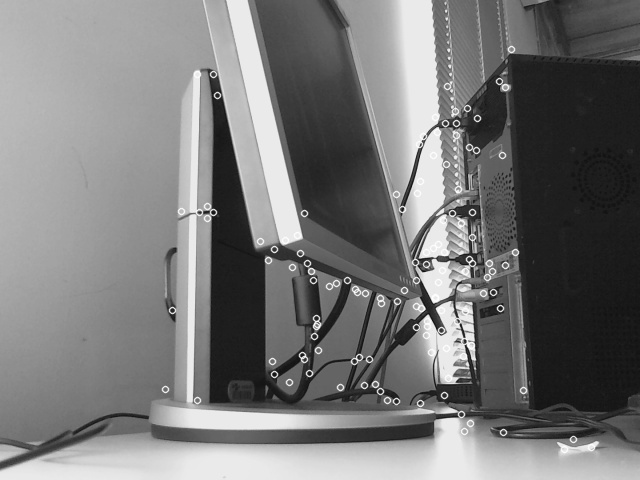{kind=link}
got the following rectified pair:
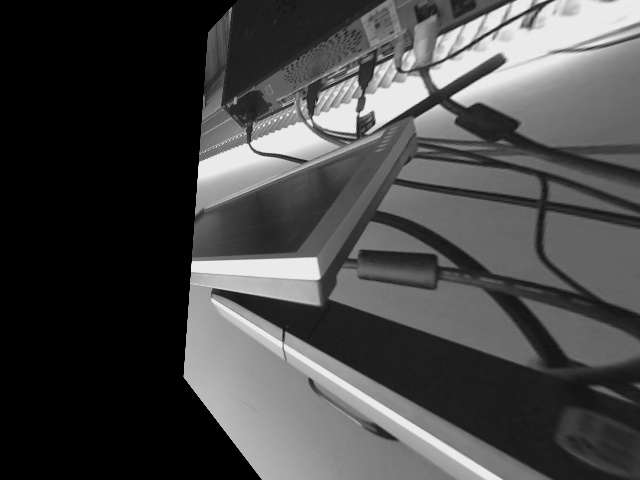{kind=link}
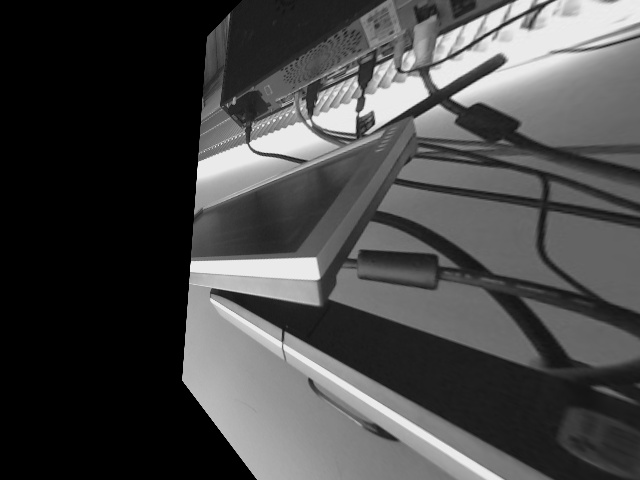{kind=link}
and finally, the following disparity map
{kind=link}
Which, as you can see, is quite bad. I've also tried the same pair of images with the following stereoRectifyUncalibrated example: http://programmingexamples.net/wiki/OpenCV/WishList/StereoRectifyUncalibrated and the SBM_Sample.cpp from opencv tutorial code samples to build the disparity map, and got a very similar result.
I'm using opencv 2.4
Thanks in advance!