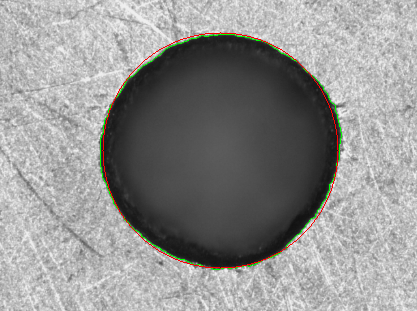
My goal is to accurately measure the diameter of a hole from a microscope. Workflow is: take an image, process for fitting, fit, convert radius in pixels to mm, write to a csv

This is an output of my image processing script used to measure the diameter of a hole. I'm having an issue where it seems like my circle fitting is prioritizing matching the contour rather than something like a least squares approach.
I've alternatively averaged many fits in something like this:

My issue here is I like to quickly scan to make sure the circle fit is appropriate. The trade off is the more fits I have, the more realistic the fit, the fewer I have the easier is to make sure the number is correct. My circles aren't always as pretty and circular as this one so it's important to me.
Here's the piece of my script fitting circles if you could take a look and tell me how to do more of a least squares approach on the order of 5 circles. I don't want to use minimum circle detection because a fluid is flowing through this hole so I'd like it to be more like a hydraulic diameter-- thanks!
(thresh, blackAndWhiteImage0) = cv2.threshold(img0, 100, 255, cv2.THRESH_BINARY) #make black + white
median0 = cv2.medianBlur(blackAndWhiteImage0, 151) #get rid of noise
circles0 = cv2.HoughCircles(median0,cv2.HOUGH_GRADIENT,1,minDist=5,param1= 25, param2=10, minRadius=min_radius_small,maxRadius=max_radius_small) #fit circles to image