I am working on a project where there is board and camera on top of it. The objective is to identify students who are looking at the board and also identify the location of their sight (on the board).
Currently, I am planning to approach the challenge in following parts:
- Identify Students faces
- Identify ROI of their both eye from the face detected
- Identify the location of their eye pupil/iris center and head pose
- Decide whether the person is looking at the board or not?
- If yes, which area of the board the student is looking at?
So far, i was able to do the following things:
- Identify the face and eye land-marks and face position vector (X, Y, Z )
Below is the code:
from scipy.spatial import distance as dist
from imutils.video import FileVideoStream
from imutils.video import VideoStream
from imutils import face_utils
from gaze_codefiles import get_head_pose,draw_border,iris_center
import numpy as np
import imutils
import time
import dlib
import cv2
line_pairs = [[0, 1], [1, 2], [2, 3], [3, 0],
[4, 5], [5, 6], [6, 7], [7, 4],
[0, 4], [1, 5], [2, 6], [3, 7]]
print("[INFO] loading facial landmark predictor...")
detector = dlib.get_frontal_face_detector()
predictor = dlib.shape_predictor('./shape_predictor_68_face_landmarks.dat')
print("[INFO] camera sensor warming up...")
vs = VideoStream(src=0).start()
(lStart, lEnd) = face_utils.FACIAL_LANDMARKS_IDXS["left_eye"]
(rStart, rEnd) = face_utils.FACIAL_LANDMARKS_IDXS["right_eye"]
# vs = VideoStream(usePiCamera=True).start() # Raspberry Pi
time.sleep(2.0)
while True:
frame = vs.read()
frame = imutils.resize(frame, width=400)
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
rects = detector(gray,0)
for rect in rects:
(bx,by,bw,bh) = face_utils.rect_to_bb(rect)
draw_border(frame,(bx,by),(bx+bw,by+bh),(127,255,255),1,10,20)
shape = predictor(gray,rect)
shape = face_utils.shape_to_np(shape)
leftEye = shape[lStart:lEnd]
rightEye = shape[rStart:rEnd]
leftEyeHull = cv2.convexHull(leftEye)
rightEyeHull = cv2.convexHull(rightEye)
cv2.drawContours(frame, [leftEyeHull], -1, (127, 255, 255), 1)
cv2.drawContours(frame, [rightEyeHull], -1, (127, 255, 255), 1)
reprojectdst, euler_angle = get_head_pose(shape)
image_points = np.float32([shape[17], shape[21], shape[22], shape[26], shape[36],
shape[39], shape[42], shape[45], shape[31], shape[35],
shape[48], shape[54], shape[57], shape[8]])
#for start, end in line_pairs:
#cv2.line(frame, reprojectdst[start], reprojectdst[end], (0, 0, 255))
for p in image_points:
cv2.circle(frame, (int(p[0]), int(p[1])), 1, (0,0,255), -1)
#p1 = (int(shape[34][0]), int(shape[34][1]))
#p2 = (int(reprojectdst[0][0]), int(reprojectdst[0][1]))
#cv2.line(frame, p1, p2, (255,0,0), 2)
cv2.putText(frame, "X: " + "{:7.2f}".format(euler_angle[0, 0]), (20, 20), cv2.FONT_HERSHEY_SIMPLEX,
0.5, (127, 255, 255), thickness=1)
cv2.putText(frame, "Y: " + "{:7.2f}".format(euler_angle[1, 0]), (20, 50), cv2.FONT_HERSHEY_SIMPLEX,
0.5, (127, 255, 255), thickness=1)
cv2.putText(frame, "Z: " + "{:7.2f}".format(euler_angle[2, 0]), (20, 80), cv2.FONT_HERSHEY_SIMPLEX,
0.5, (127, 255, 255), thickness=1)
#cv2.putText(frame,"Left Eye Center is:{}".format(tuple(lefteyecenter)),(20,100),cv2.FONT_HERSHEY_SIMPLEX,0.75, (127, 255, 255), thickness=2)
#cv2.putText(frame,"Left Eye Center is:{}".format(tuple(righteyecenter)),(20,100),cv2.FONT_HERSHEY_SIMPLEX,0.75, (127, 255, 255), thickness=2)
cv2.imshow("Frame", frame)
key = cv2.waitKey(1) & 0xFF
if key == ord("q"):
break
cv2.destroyAllWindows()
vs.stop()
Here is the output of the same:
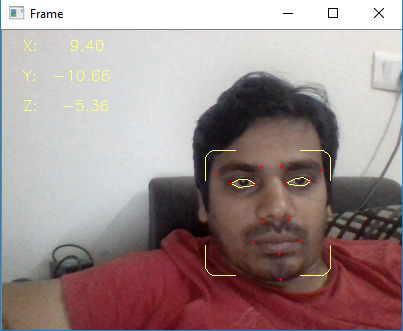
I was able to get the gaze directions of the both the eyes, now I am just to need to project these vectors on to 3D space in real world (Board or a laptop screen). Could someone direct me on that ?
