My approach for the problem is to perform color-segmentation to get a binary mask. Next, using binary mask to remove the background to make the board visible, removed from artifacts. Finally output the chess border features in an accurate way.
-
- Performing color-segmentation: We convert the loaded image to the HSV format define lower/upper ranges and perform color segmentation using
cv2.inRange to obtain a binary mask.
-
- Extracting chess-board: After obtaining binary mask we will use it to remove the background and separate chess part from the rest of the image using
cv2.bitwise_and. Arithmetic operation and is highly useful for defining roi in hsv colored images.
-
- Displaying chess-board features. After extracting the chessboard from the image, we will set the
patternSizeto (7, 7) and flags to adaptive_thresh + fast_check + normalize image inspired from the source.
Steps:
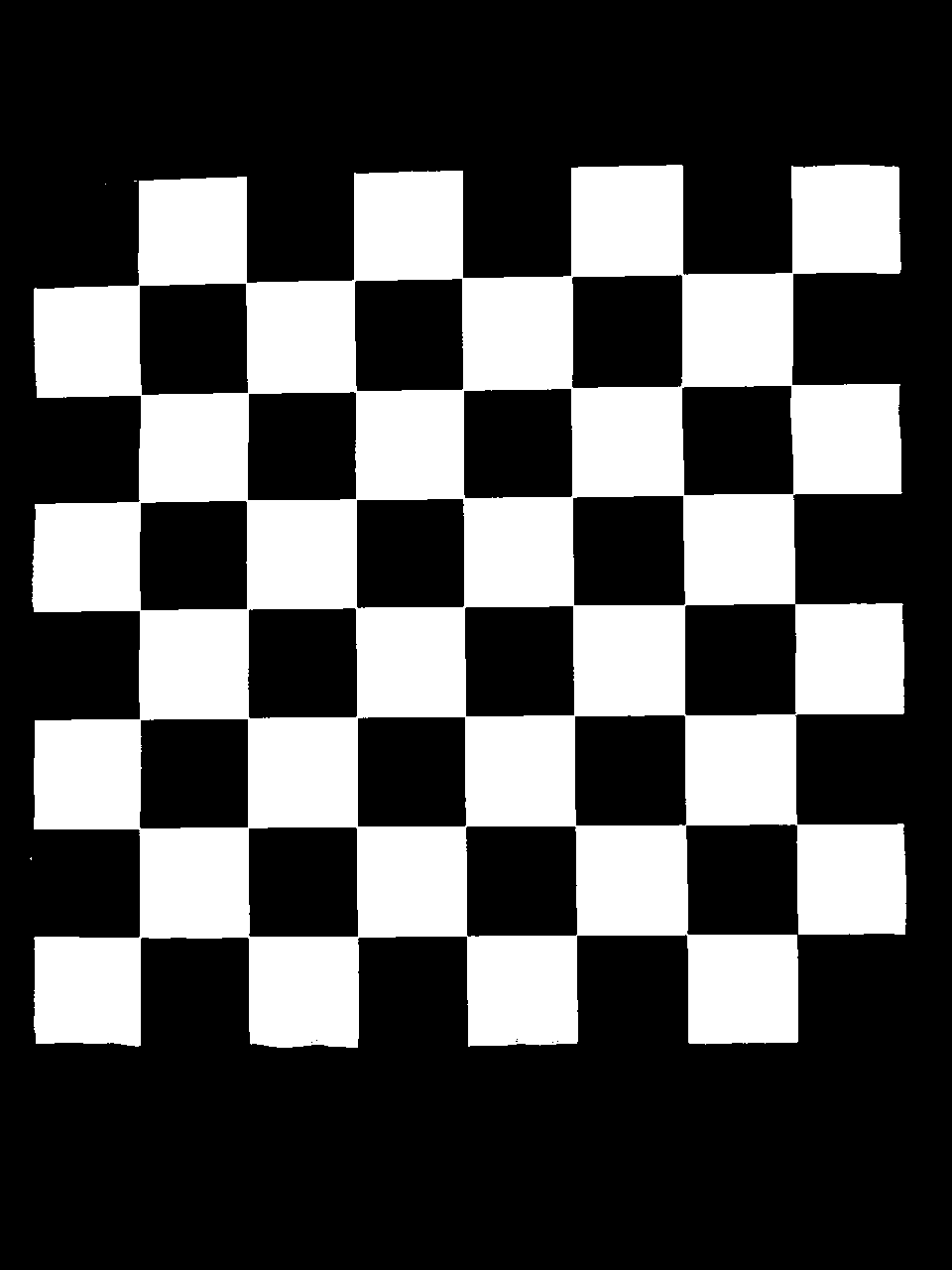
Color-segmentation to get the binary mask.
![enter image description here]()
-
lwr = np.array([0, 0, 143])
upr = np.array([179, 61, 252])
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
msk = cv2.inRange(hsv, lwr, upr)
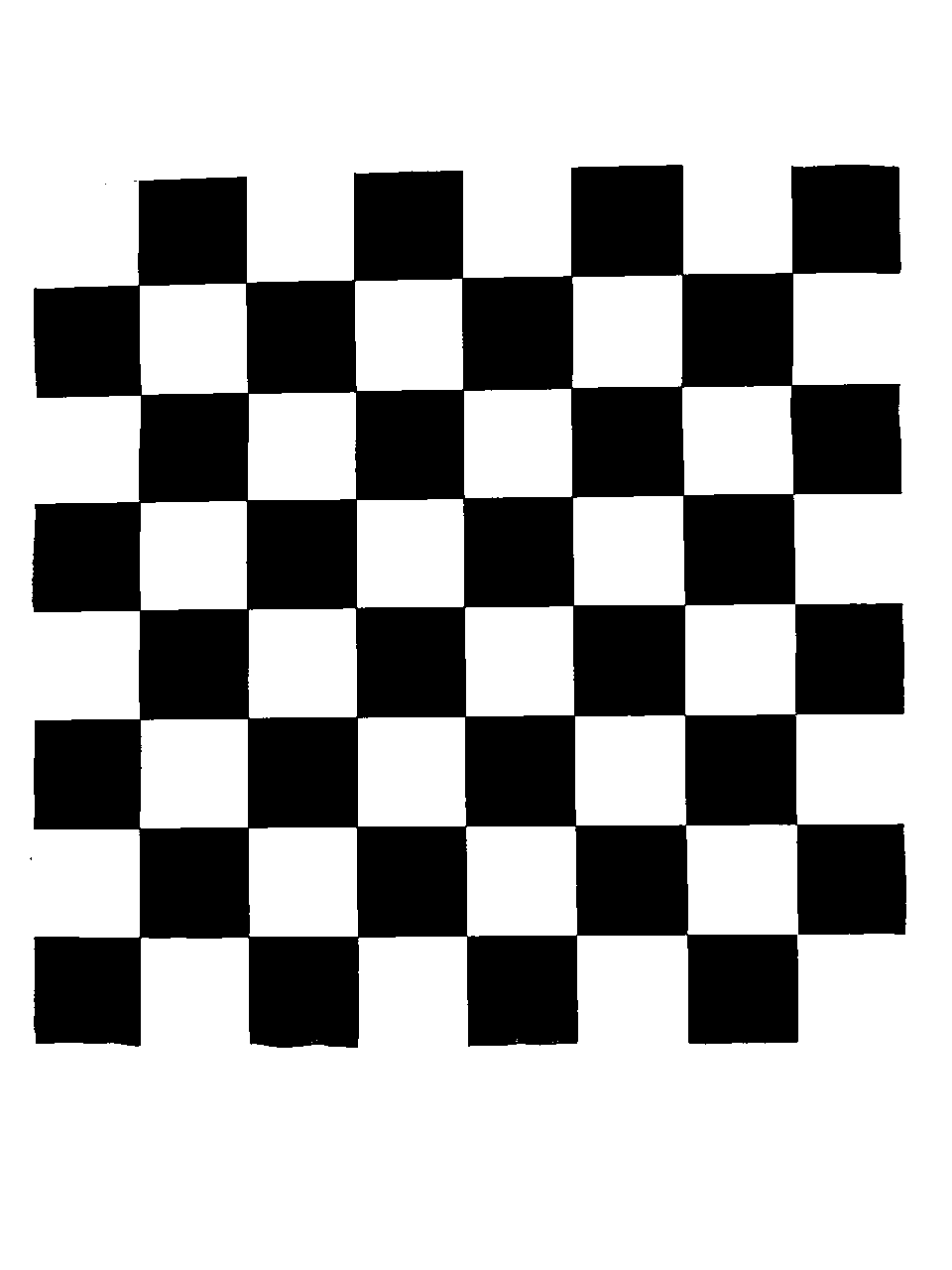
Removing background using mask
![enter image description here]()
-
krn = cv2.getStructuringElement(cv2.MORPH_RECT, (50, 30))
dlt = cv2.dilate(msk, krn, iterations=5)
res = 255 - cv2.bitwise_and(dlt, msk)
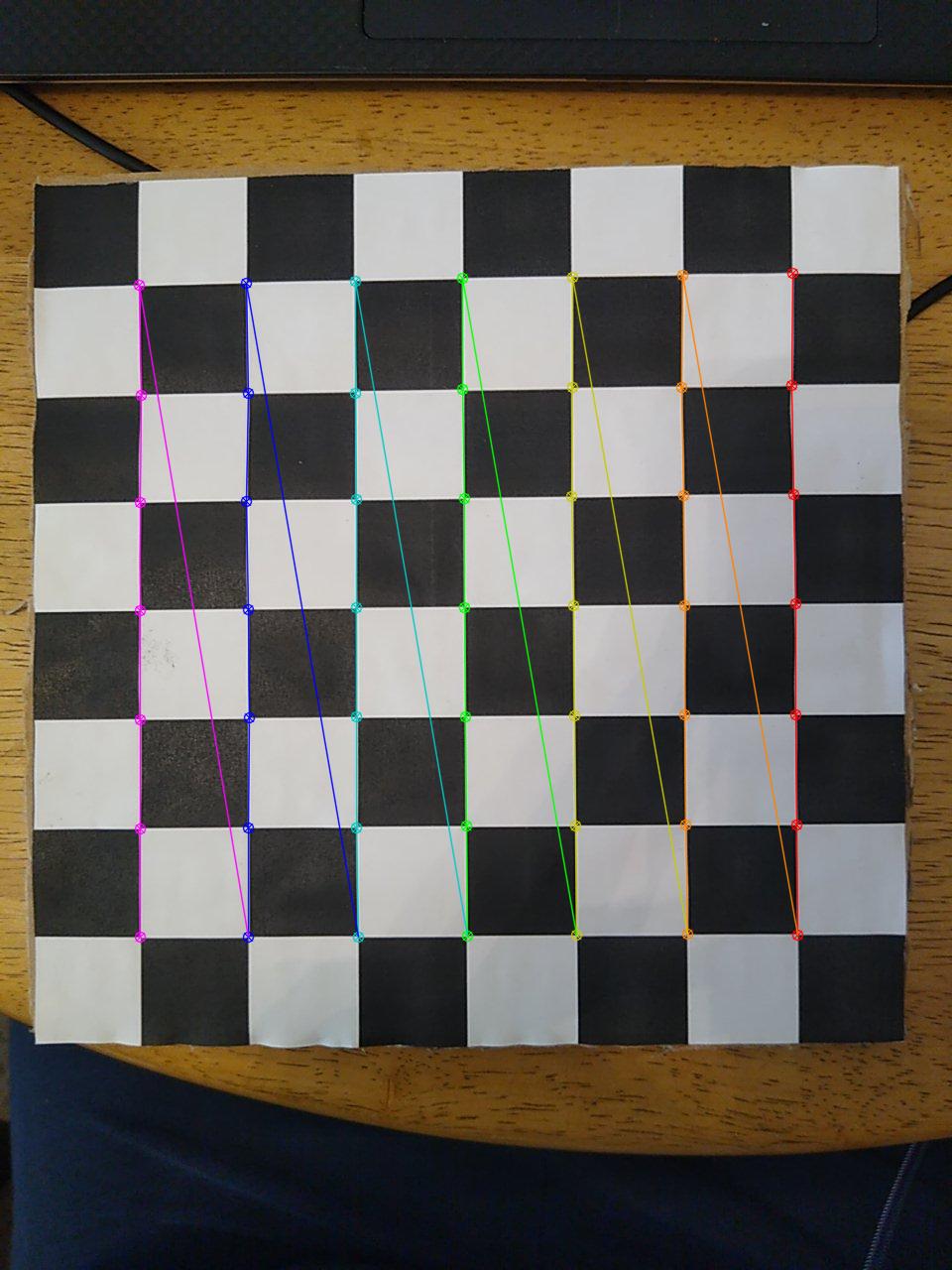
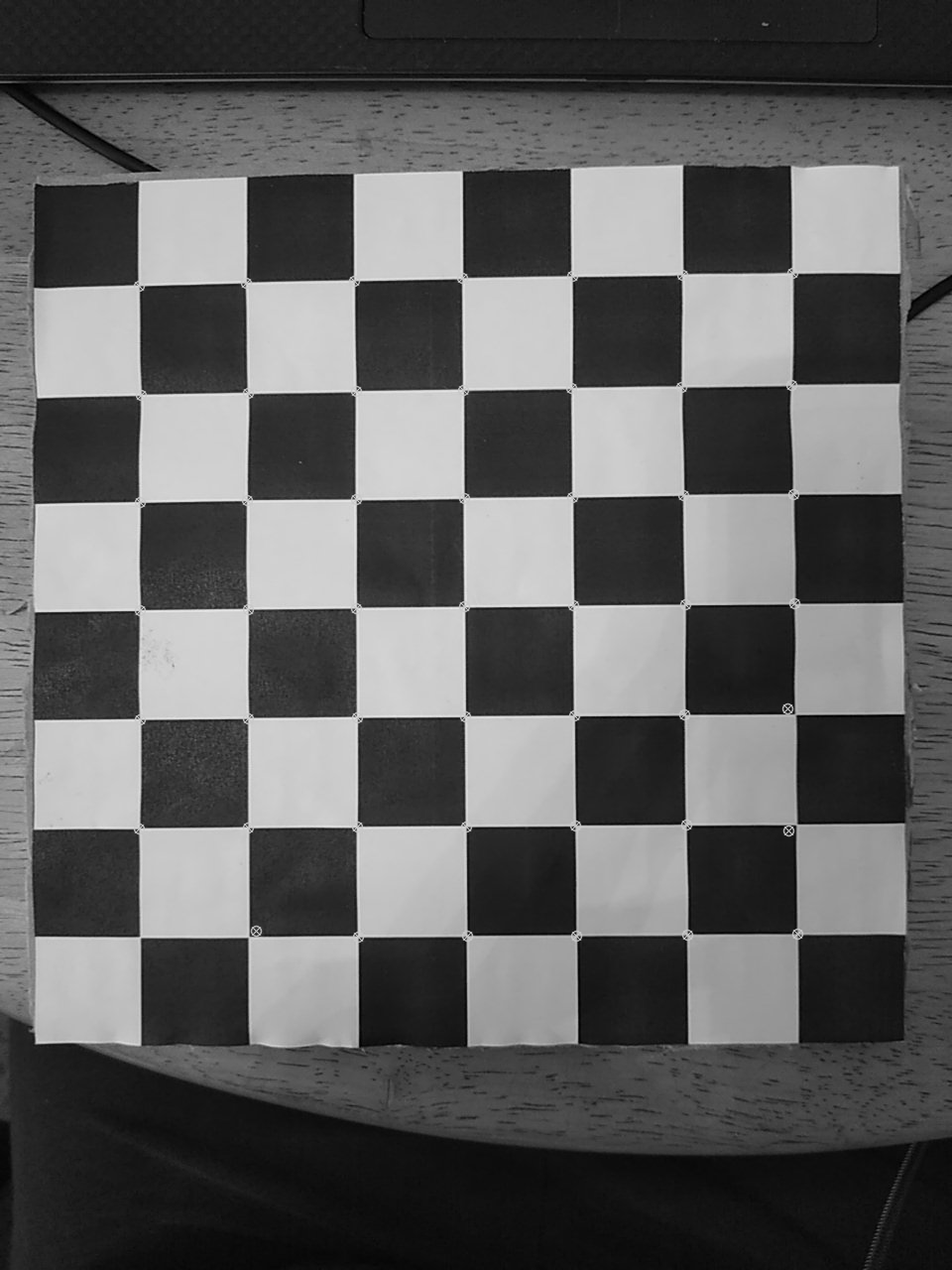
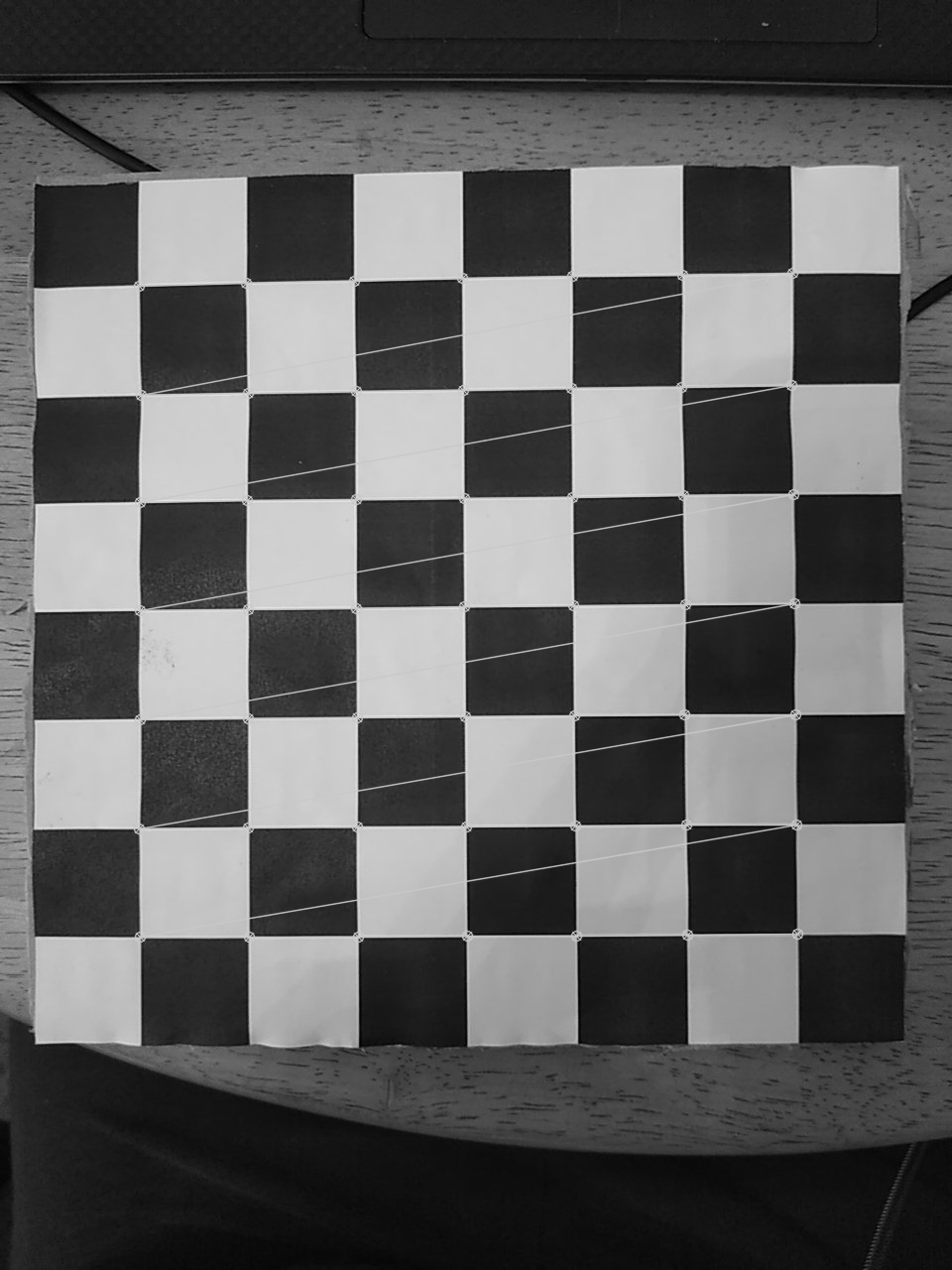
Displaying Chess-board features
![enter image description here]()
-
res = np.uint8(res)
ret, corners = cv2.findChessboardCorners(res, (7, 7),
flags=cv2.CALIB_CB_ADAPTIVE_THRESH +
cv2.CALIB_CB_FAST_CHECK +
cv2.CALIB_CB_NORMALIZE_IMAGE)
if ret:
print(corners)
fnl = cv2.drawChessboardCorners(img, (7, 7), corners, ret)
cv2.imshow("fnl", fnl)
cv2.waitKey(0)
else:
print("No Checkerboard Found")
Code:
import cv2
import numpy as np
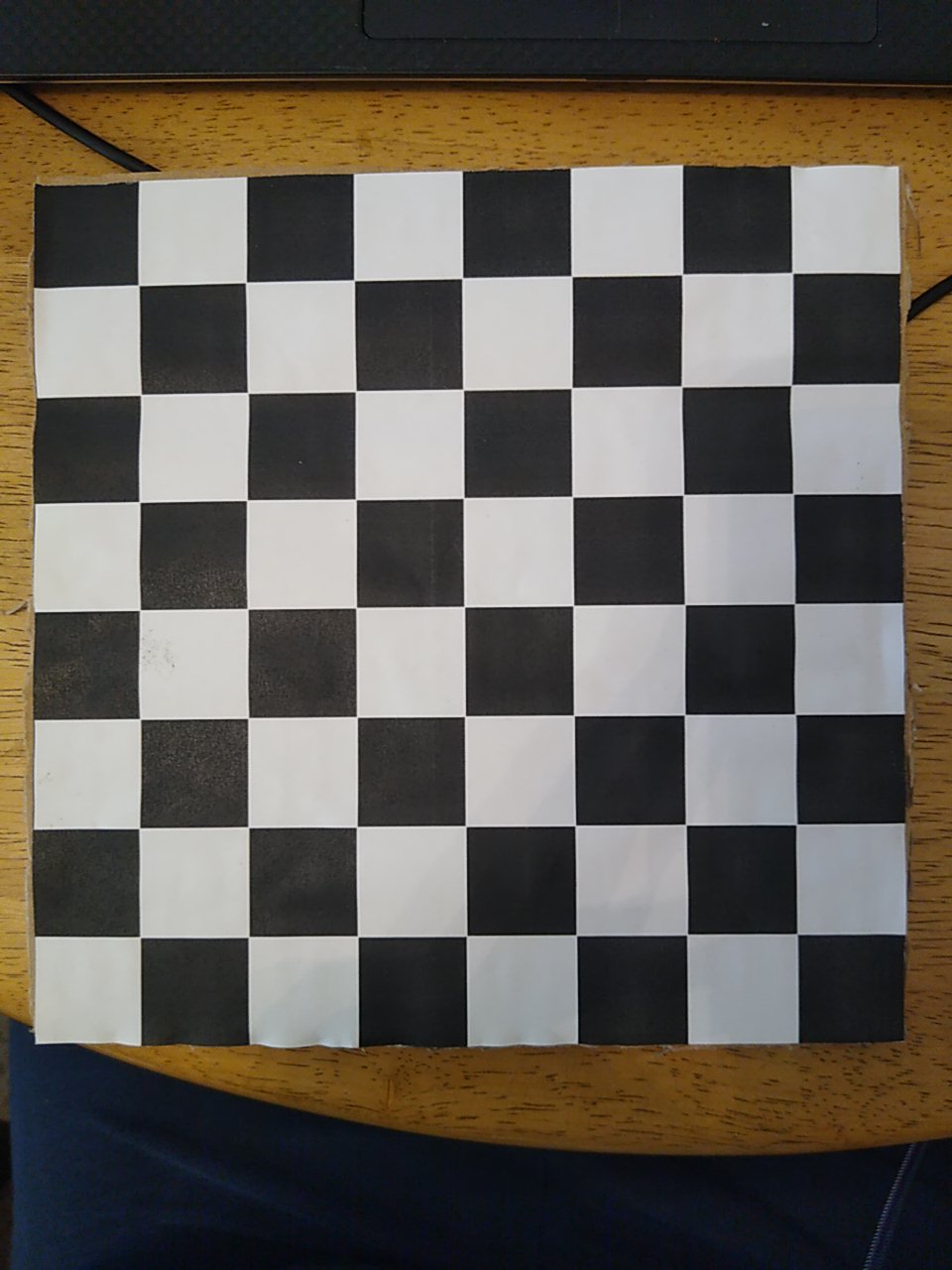
# Load the image
img = cv2.imread("kFM1C.jpg")
# Color-segmentation to get binary mask
lwr = np.array([0, 0, 143])
upr = np.array([179, 61, 252])
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
msk = cv2.inRange(hsv, lwr, upr)
# Extract chess-board
krn = cv2.getStructuringElement(cv2.MORPH_RECT, (50, 30))
dlt = cv2.dilate(msk, krn, iterations=5)
res = 255 - cv2.bitwise_and(dlt, msk)
# Displaying chess-board features
res = np.uint8(res)
ret, corners = cv2.findChessboardCorners(res, (7, 7),
flags=cv2.CALIB_CB_ADAPTIVE_THRESH +
cv2.CALIB_CB_FAST_CHECK +
cv2.CALIB_CB_NORMALIZE_IMAGE)
if ret:
print(corners)
fnl = cv2.drawChessboardCorners(img, (7, 7), corners, ret)
cv2.imshow("fnl", fnl)
cv2.waitKey(0)
else:
print("No Checkerboard Found")
To find lower and upper boundaries of the mask, you may find useful: HSV-Threshold-script
{kind=link}
{kind=link}
cv.findChessboardCorners(image, (7,7), None)? Also when you changed (7,7) with 3,6 or 6,7 the results still dont change ? – Pictorialreturn corners[0][0], corners[1][0].corners[0][1]gives me an error. But the code detects 49 corners. The problem might be in the code you didn't post. – Pugging