I would use the following approach to try and find the four lines provided in the question.
1. Read the image, and convert it into grayscale
import cv2
import numpy as np
rgb_img = cv2.imread('pipe.jpg')
gray_img = cv2.cvtColor(rgb_img, cv2.COLOR_BGR2GRAY)
height, width = gray_img.shape
2. Add some white padding to the top of the image ( Just to have some extra background )
white_padding = np.zeros((50, width, 3))
white_padding[:, :] = [255, 255, 255]
rgb_img = np.row_stack((white_padding, rgb_img))
Resultant image - ![white padded image]() 3. Invert the gray scale image and apply black padding to the top
3. Invert the gray scale image and apply black padding to the top
gray_img = 255 - gray_img
gray_img[gray_img > 100] = 255
gray_img[gray_img <= 100] = 0
black_padding = np.zeros((50, width))
gray_img = np.row_stack((black_padding, gray_img))
![Black padded image]()
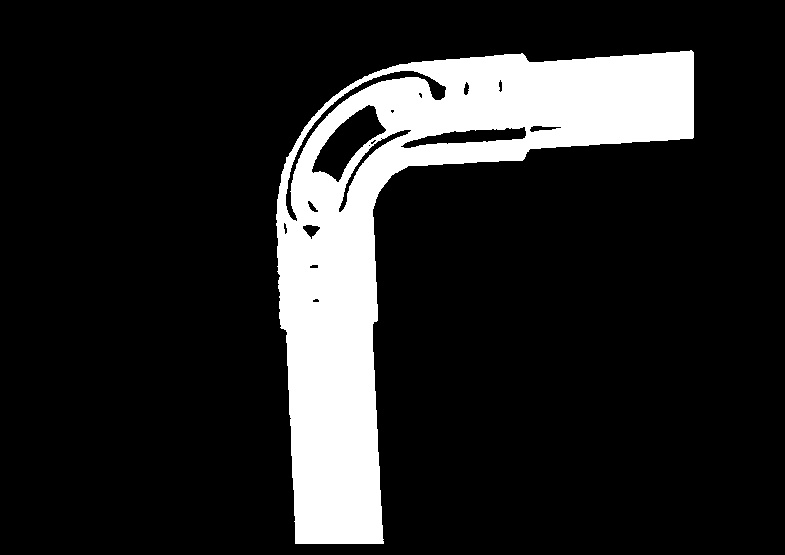
4.Use Morphological closing to fill the holes in the image -
kernel = np.ones((30, 30), np.uint8)
closing = cv2.morphologyEx(gray_img, cv2.MORPH_CLOSE, kernel)
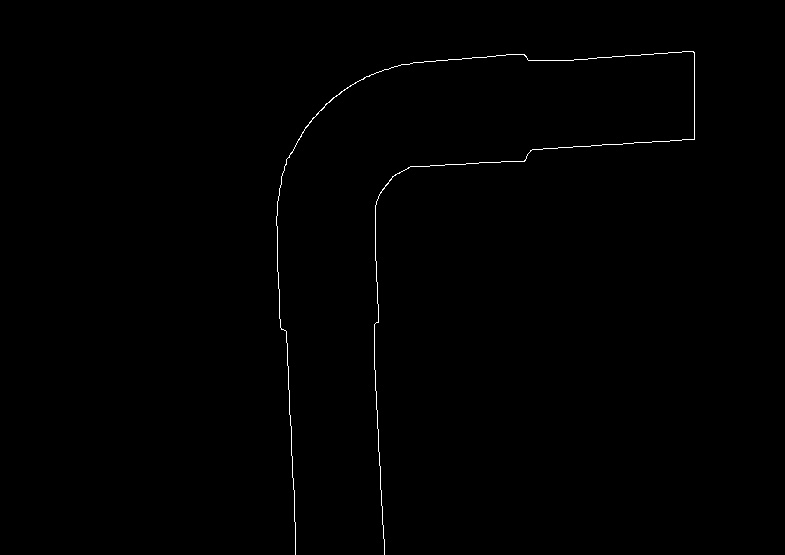
![closed image]() 5. Find edges in the image using Canny edge detection -
5. Find edges in the image using Canny edge detection -
edges = cv2.Canny(closing, 100, 200)
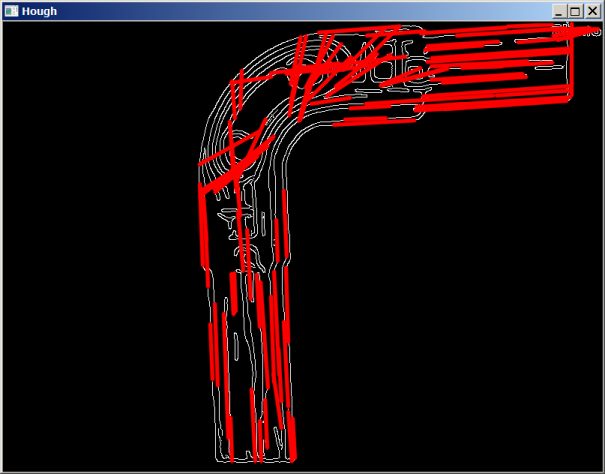
![pipe edges image]() 6. Now, we can use openCV's
6. Now, we can use openCV's HoughLinesP function to find lines in the given image -
minLineLength = 500
maxLineGap = 10
lines = cv2.HoughLinesP(edges, 1, np.pi / 180, 50, None, 50, 100)
all_lines = lines[0]
for x1,y1,x2,y2 in lines[0]:
cv2.line(rgb_img,(x1,y1),(x2,y2),(0,0,255),2)
![enter image description here]() 7.Now, we have to find the two rightmost horizontal lines, and the two bottommost vertical lines. For the horizontal lines, we will sort the lines using both (x2, x1), in descending order. The first line in this sorted list will be the rightmost vertical line. Skipping that, if we take the next two lines, they will be the rightmost horizontal lines.
7.Now, we have to find the two rightmost horizontal lines, and the two bottommost vertical lines. For the horizontal lines, we will sort the lines using both (x2, x1), in descending order. The first line in this sorted list will be the rightmost vertical line. Skipping that, if we take the next two lines, they will be the rightmost horizontal lines.
all_lines_x_sorted = sorted(all_lines, key=lambda k: (-k[2], -k[0]))
for x1,y1,x2,y2 in all_lines_x_sorted[1:3]:
cv2.line(rgb_img,(x1,y1),(x2,y2),(0,0,255),2)
![horizontal lines image]() 8. Similarly, the lines can be sorted using the y1 coordinate, in descending order, and the first two lines in the sorted list will be the bottommost vertical lines.
8. Similarly, the lines can be sorted using the y1 coordinate, in descending order, and the first two lines in the sorted list will be the bottommost vertical lines.
all_lines_y_sorted = sorted(all_lines, key=lambda k: (-k[1]))
for x1,y1,x2,y2 in all_lines_y_sorted[:2]:
cv2.line(rgb_img,(x1,y1),(x2,y2),(0,0,255),2)
![vertical lines image]() 9. Image with both lines -
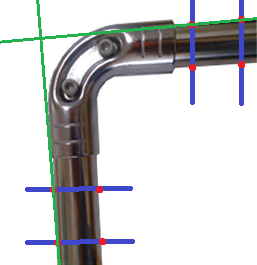
9. Image with both lines -
final_lines = all_lines_x_sorted[1:3] + all_lines_y_sorted[:2]
![final lines]()
Thus, obtaining these 4 lines can help you finish the rest of your task.