The Concept
This is one of the cases where it is really useful to fine-tune the kernels of which you are using to dilate and erode the canny edges detected from the images. Here is an example, where the dilation kernel is np.ones((4, 2)) and the erosion kernel is np.ones((13, 7)):
The Code
import cv2
import numpy as np
def process(img):
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
img_blur = cv2.GaussianBlur(img_gray, (3, 3), 2)
img_canny = cv2.Canny(img_blur, 50, 9)
img_dilate = cv2.dilate(img_canny, np.ones((4, 2)), iterations=11)
img_erode = cv2.erode(img_dilate, np.ones((13, 7)), iterations=4)
return cv2.bitwise_not(img_erode)
def get_contours(img):
contours, _ = cv2.findContours(process(img), cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
cnt = max(contours, key=cv2.contourArea)
cv2.drawContours(img, [cv2.convexHull(cnt)], -1, (0, 0, 255), 2)
img = cv2.imread("image2.png")
get_contours(img)
cv2.imshow("result", img)
cv2.waitKey(0)
cv2.destroyAllWindows()
The Output
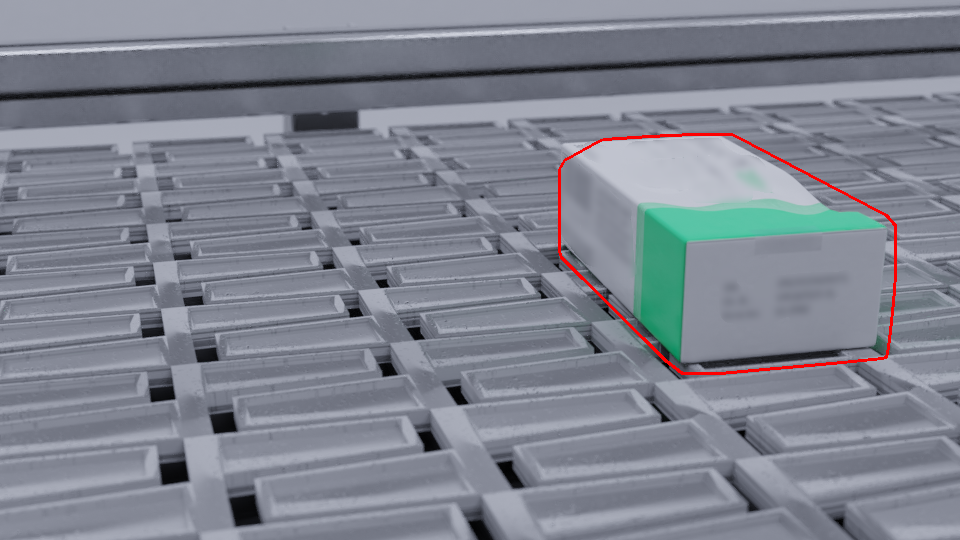
Output for each of the two images provided:
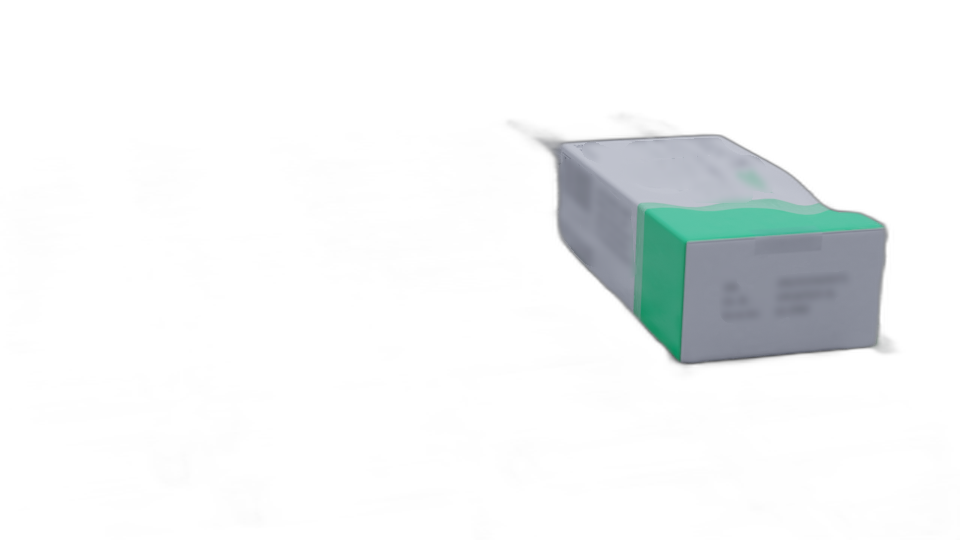
Image 1:
![enter image description here]()
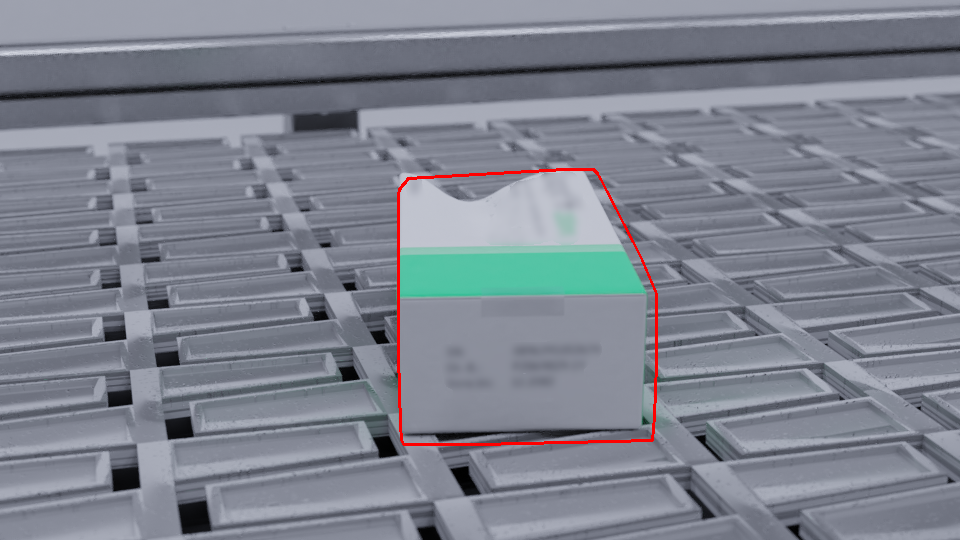
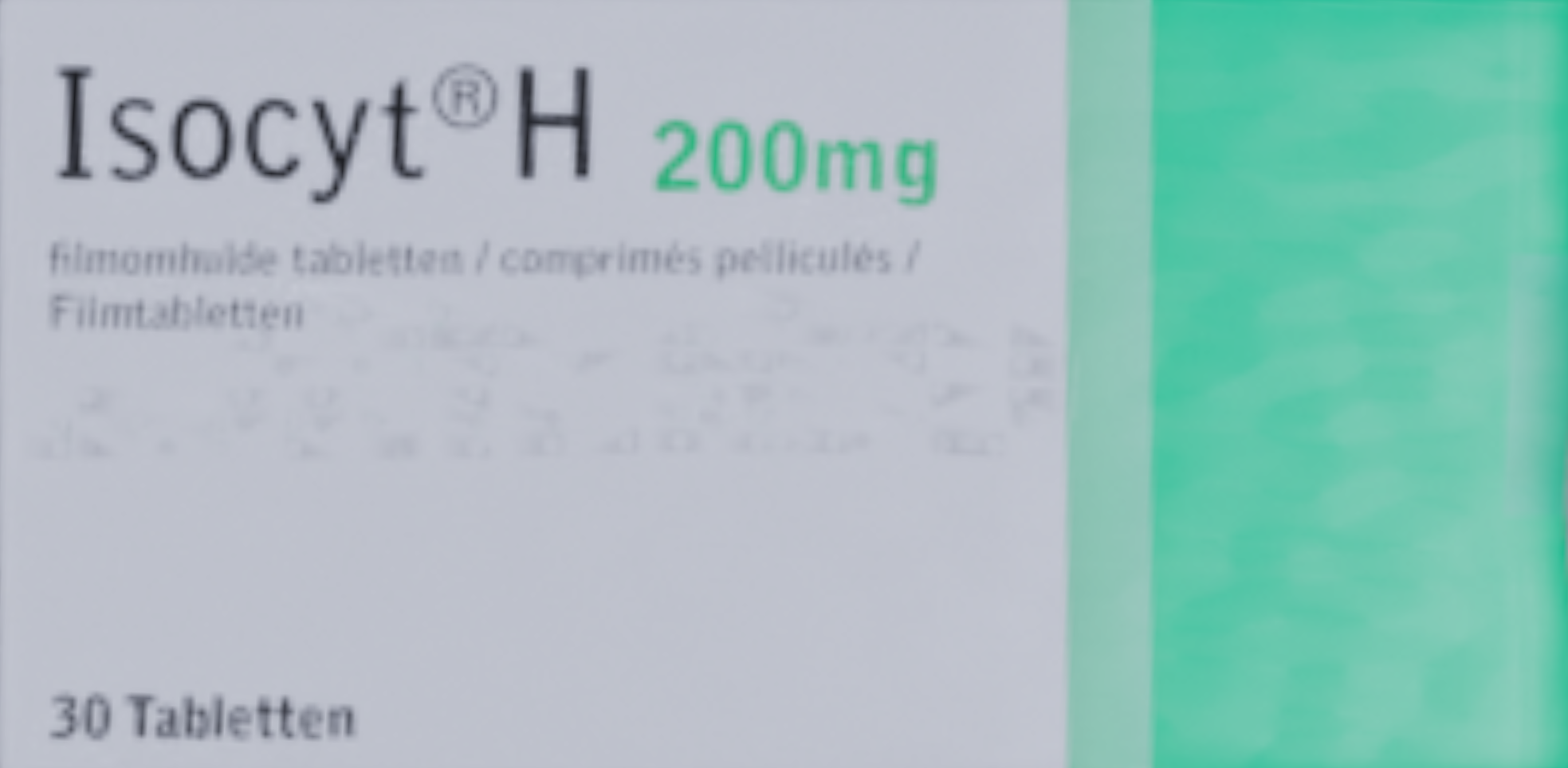
Image 2:
![enter image description here]()
Notes
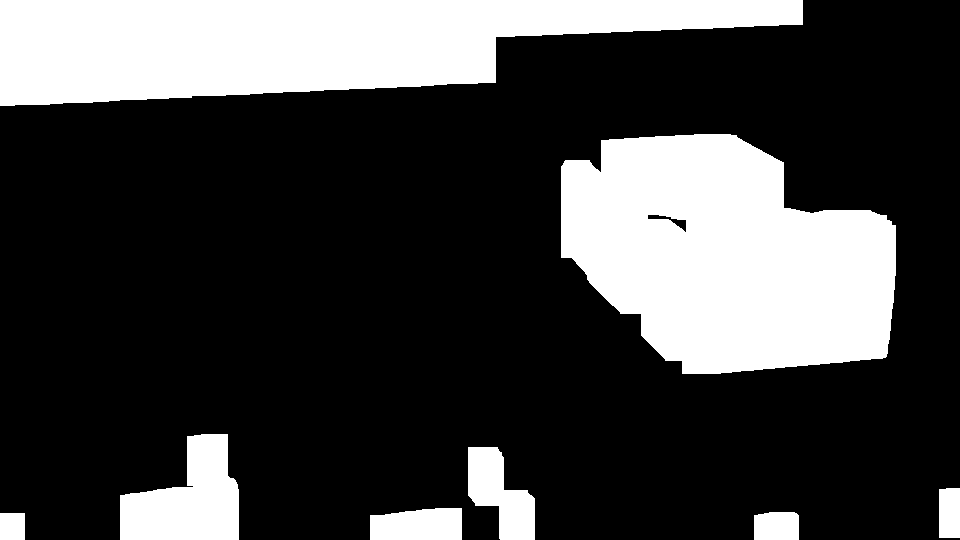
Note that the processed image (which is binary) is inverted at cv2.bitwise_not(img_erode). Observe the processed version of both images (returned by the process() function defined above), with the inversion:
Processed Image 1:
![enter image description here]()
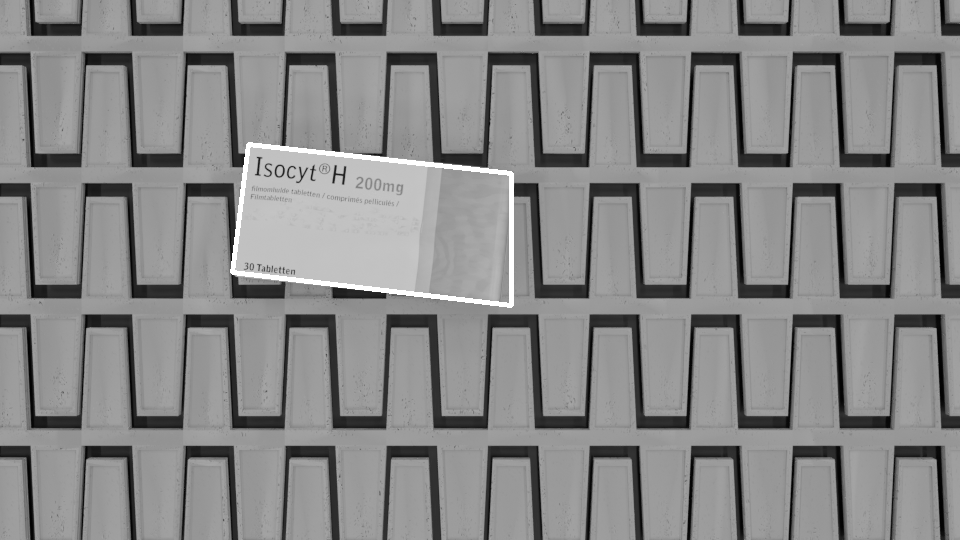
Processed Image 2:
![enter image description here]()
Tools
Finally, if you happen to have other images where the above program doesn't work properly on, you can use OpenCV Trackbars to adjust the values passed into the methods with the program below:
import cv2
import numpy as np
def process(img, b_k, b_s, c_t1, c_t2, k1, k2, k3, k4, iter1, iter2):
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
b_k = b_k // 2 * 2 + 1
img_blur = cv2.GaussianBlur(img_gray, (b_k, b_k), b_s)
img_canny = cv2.Canny(img_blur, c_t1, c_t2)
img_dilate = cv2.dilate(img_canny, np.ones((k1, k2)), iterations=iter1)
img_erode = cv2.erode(img_dilate, np.ones((k3, k4)), iterations=iter2)
return cv2.bitwise_not(img_erode)
d = {"Blur Kernel": (3, 50),
"Blur Sigma": (2, 30),
"Canny Threshold 1": (50, 500),
"Canny Threshold 2": (9, 500),
"Dilate Kernel1": (4, 50),
"Dilate Kernel2": (2, 50),
"Erode Kernel1": (13, 50),
"Erode Kernel2": (7, 50),
"Dilate Iterations": (11, 40),
"Erode Iterations": (4, 40)}
cv2.namedWindow("Track Bars")
for i in d:
cv2.createTrackbar(i, "Track Bars", *d[i], id)
img = cv2.imread("image1.png")
while True:
img_copy = img.copy()
processed = process(img, *(cv2.getTrackbarPos(i, "Track Bars") for i in d))
contours, _ = cv2.findContours(processed, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
if contours:
cnt = max(contours, key=cv2.contourArea)
cv2.drawContours(img_copy, [cv2.convexHull(cnt)], -1, (0, 0, 255), 2)
cv2.imshow("result", img_copy)
if cv2.waitKey(1) & 0xFF == ord("q"):
break
cv2.waitKey(0)
cv2.destroyAllWindows()
![enter image description here]()
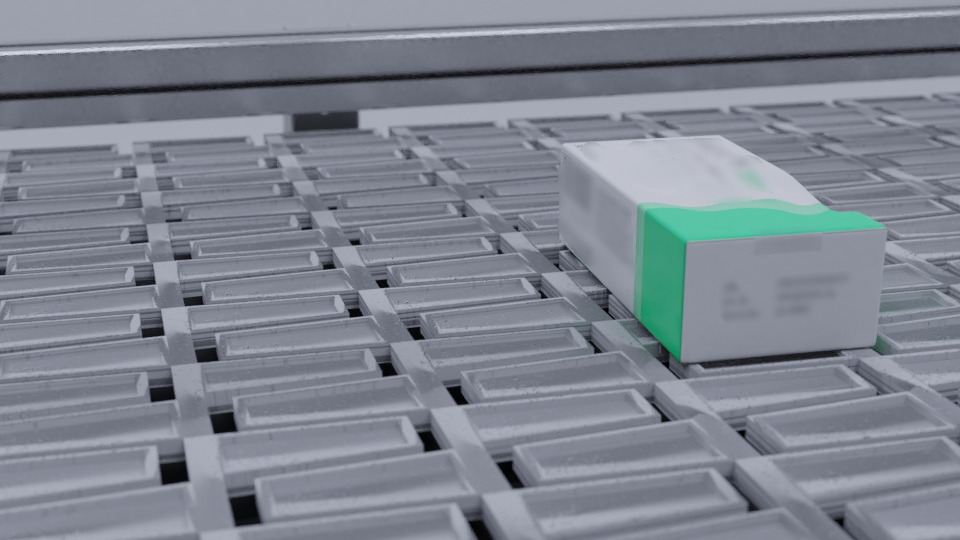
 I want to remove the background, and draw the outline of the box shown in the image(there are multiple such images with a similar background) . I tried multiple methods in OpenCV, however I am unable to determine the combination of features which can help remove background for this image. Some of the approaches tried out were:
I want to remove the background, and draw the outline of the box shown in the image(there are multiple such images with a similar background) . I tried multiple methods in OpenCV, however I am unable to determine the combination of features which can help remove background for this image. Some of the approaches tried out were: