I need some help with writing this algorithm.
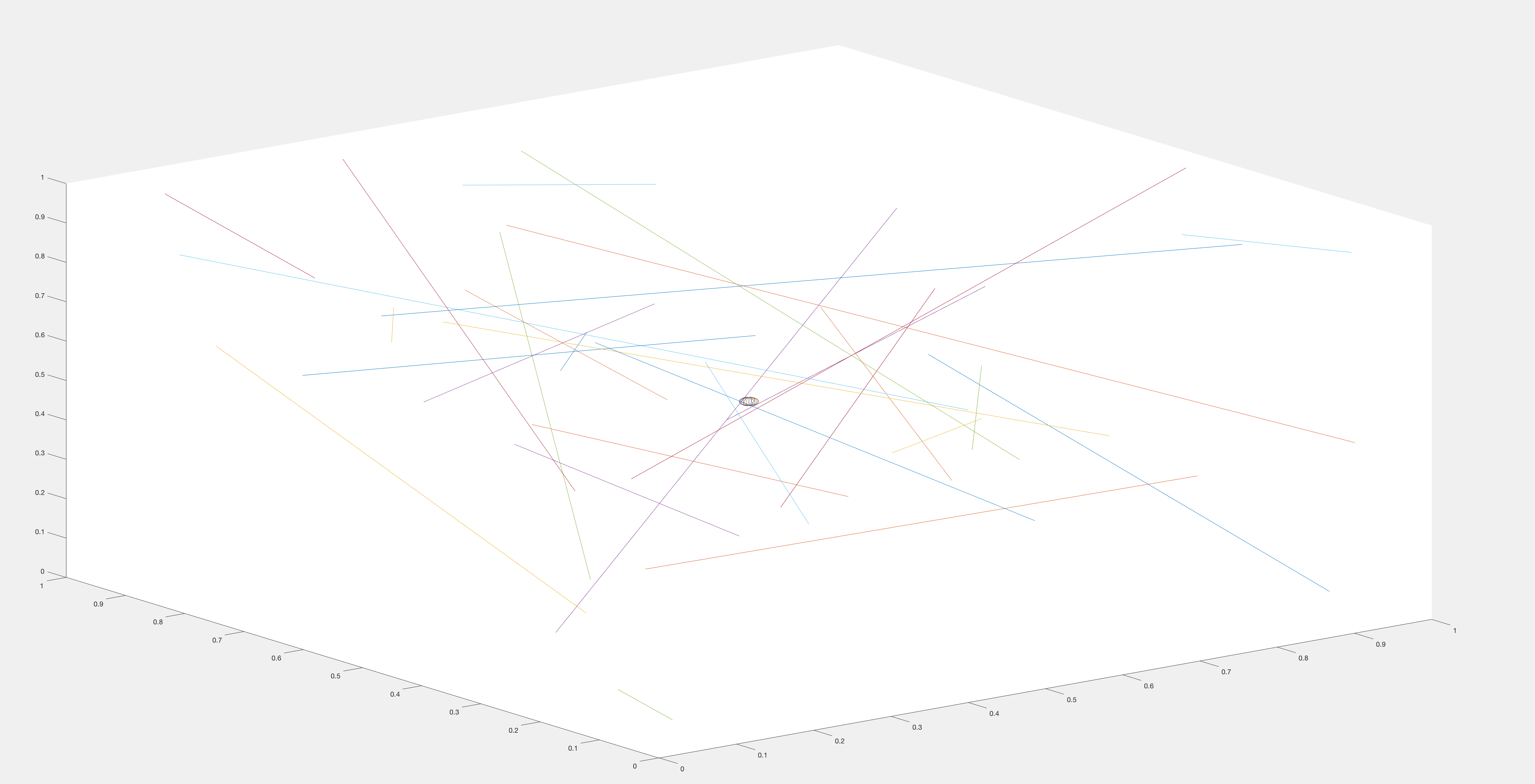
For a given set of lines in space, I am trying to find the accessible volume when the origin (reference point) is 0.5,0.5,0.5. Currently, I do the following:
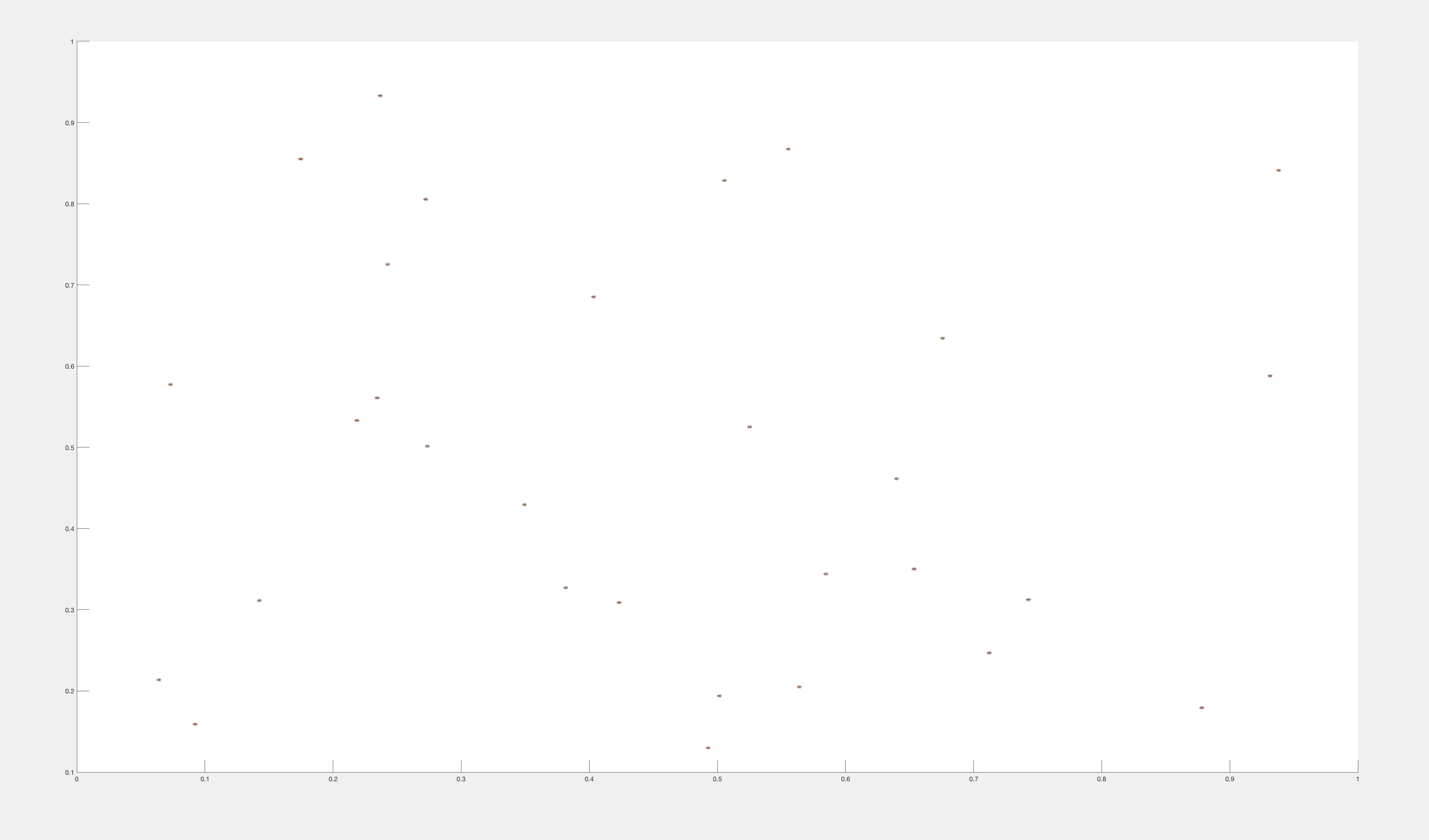
For each line, calculate the distance to the origin (0.5,0.5,0.5). Then, gather all these perpendicular distance points on all the lines into a list.
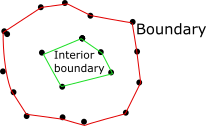
Now, I would like to calculate the "interior" (neither the boundary nor the convhull), because I want to evaluate the accessible volume for a ball centered at (0.5,0.5,0.5).
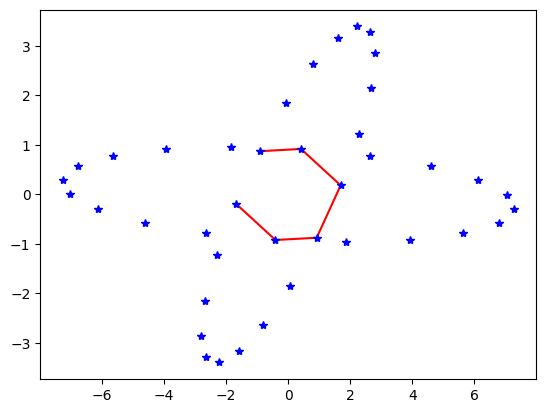
For example I would like to compute with my algorithm the green (internal line) in this simple example:
The configuration:
The closest points from the origin (0.5,0.5,0.5) to the lines

Only the points for whom I want the "internal boundary" be computed. Meaning the shape that bounds all the point either outside of the interior or on its boundary.
Here is the code for which I want something else rather than convhull:
close all
N=30;
S1 = cell(1, N);
for k = 1:N, S1{k} = rand(1, 3); end
S2 = cell(1, N);
for k = 1:N, S2{k} = rand(1, 3); end
M1 = cat(3, S1{:});
M2 = cat(3, S2{:});
M = permute(cat(1, M1, M2), [1, 3, 2]);
figure
plot3(M(:, :, 1), M(:, :, 2), M(:, :, 3))
hold on
[x,y,z] = sphere;
x=x/100;y=y/100;z=z/100;
plot3(x+0.5,y+0.5,z+0.5)
figure
hold on
NearestIntersectionPoints = cell(1,N);
for k = 1:N
tmp1 = M(1,k,:); tmp2 = M(2,k,:);
v1=tmp1(1,:); v2=tmp2(1,:);
[d, intersection] = point_to_line([0.5,0.5,0.5], v1, v2);
[x,y,z] = sphere;
x=x/500;y=y/500;z=z/500;
plot3(x+intersection(1),y+intersection(2),z+intersection(3))
NearestIntersectionPoints{k} = intersection;
end
MHull = cat(3,NearestIntersectionPoints{:});
X=MHull(:,1,:); Y=MHull(:,2,:); Z=MHull(:,3,:);
X=X(:); Y=Y(:); Z=Z(:);
k = boundary(X,Y,Z);
hold on
plot3(X(k),Y(k),Z(k), 'r-*')
function [d,intersection] = point_to_line(pt, v1, v2)
a = v1 - v2;
b = pt - v2;
d = norm(cross(a,b)) / norm(a);
theta = asin(norm(cross(a,b))/(norm(a)*norm(b)));
intersection = v2 + a * cos(theta);
end