Is there any algorithm that would allow to approximate a path on the x-y plane (i.e. an ordered suite of points defined by x and y) with a limited number of line segments and arcs of circles (constant curvature)? The resulting curve needs to be C1 (continuity of slope).
The maximum number or segments and arcs could be a parameter. An additional interesting constraint would be to prevent two consecutive circles of arcs without an intermediate line segment joining them.
I do not see any way to do this, and I do not think that there exists a method for it, but any hint towards this objective is welcome.
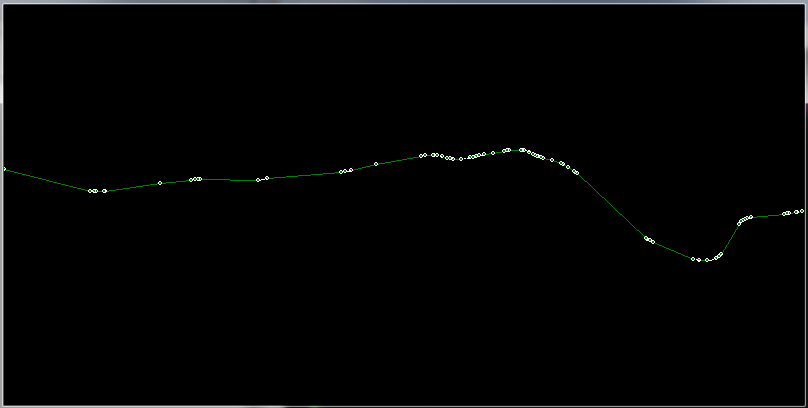
Example:
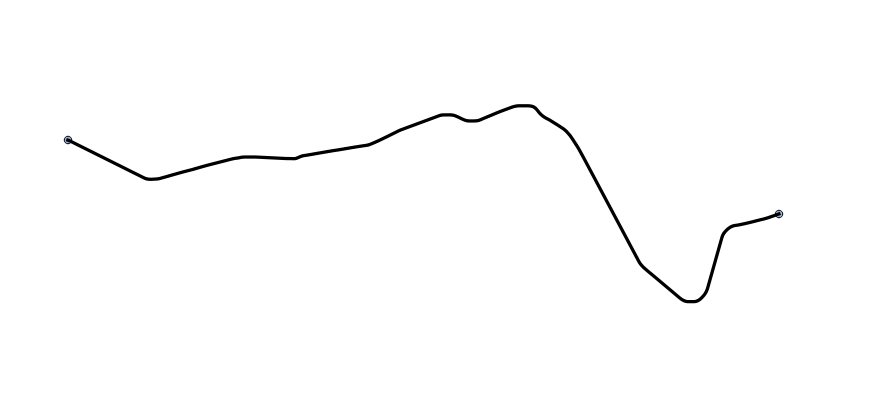
Consider this path. It looks like a line, but is actually an ordered suite of very close points. There is no noise and the order of the sequence of points is well known.
I would like to approximate this curve with a minimum number of succession of line segments and circular arcs (let's say 10 line segments and 10 circular arcs) and a C1 continuity. The number of segments/arcs is not an objective itself but I need any parameter which would allow to reduce/increase this number to attain a certain simplicity of the parametrization, at the cost of accuracy loss.
Solution:
Here is my solution, based on Spektre's answer. Red curve is original data. Black lines are segments and blue curves are circle arcs. Green crosses are arc centers with radii shown and blue ones are points where segments potentially join.
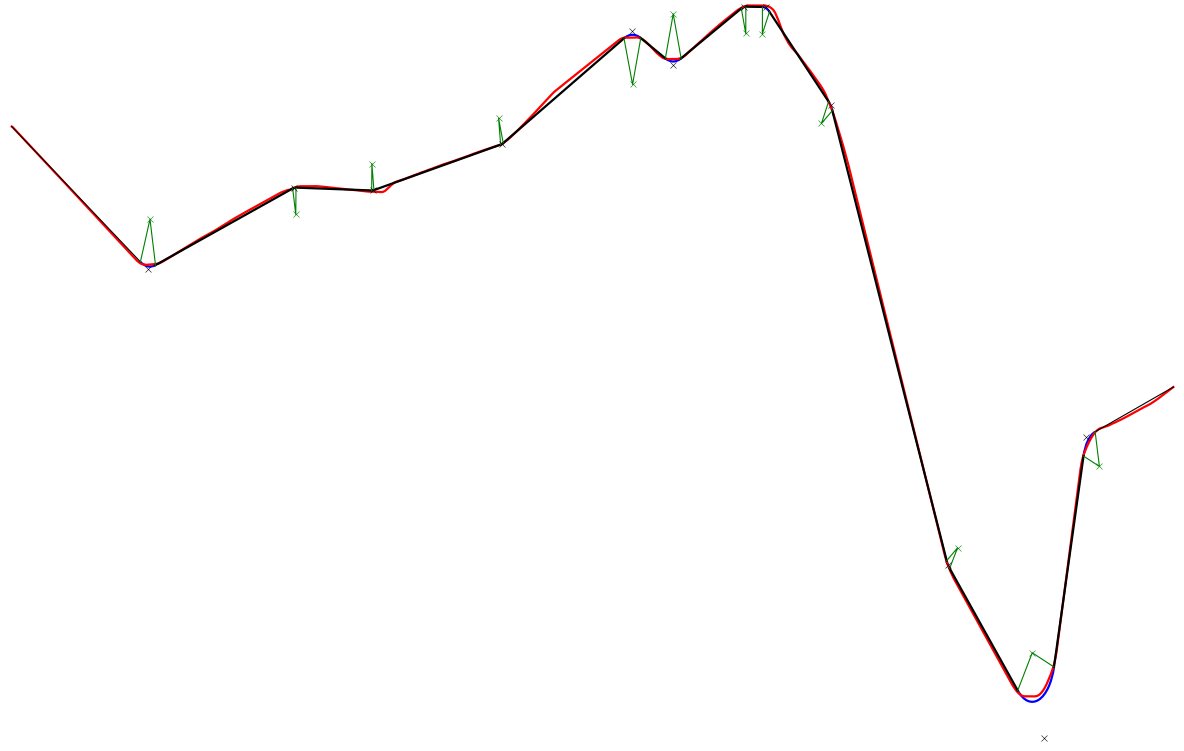
- Detect line segments, based on slope max deviation and segment minimal length as parameters. The slope of the new segment step is compared with the average step of the existing segment. I would prefer an optimization-based method, but I do not think that it exists for disjoint segments with unknown number, position and length.
- Join segments with tangent arcs. To close the system, the radius is chosen such that the segments extremities are the least possible moved. A minimum radius constraint has been added for my purposes. I believe that there will be some special cases to treat in the inflexion points are far away when (e.g. lines are nearly parallel) and interact with neigboring segments.