G'day
I'm trying to program a smart way to find the closest grid points to the points along a contour.
The grid is a 2-dimensional grid, stored in x and y (which contain the x and y kilometre positions of the grid cells).
The contour is a line, made up of x and y locations, not necessarily regularly spaced.
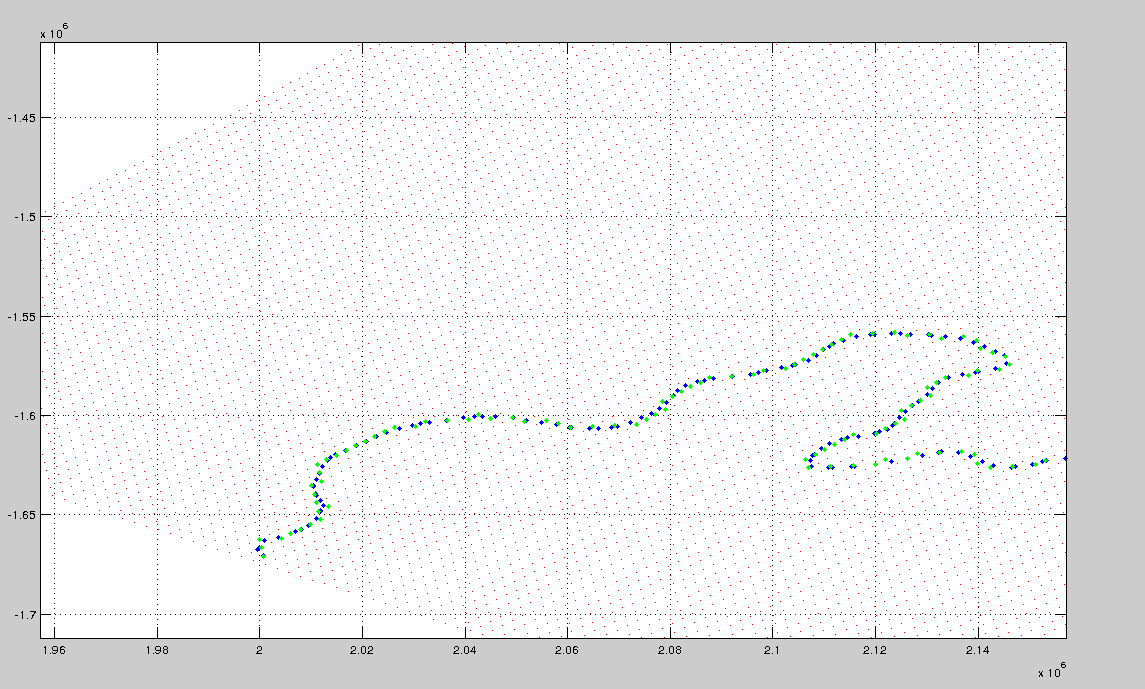
This is shown below - the red dots are the grid, and the blue dots are the points on the contour. How do I find the indices of the red dot closest to each blue dot?
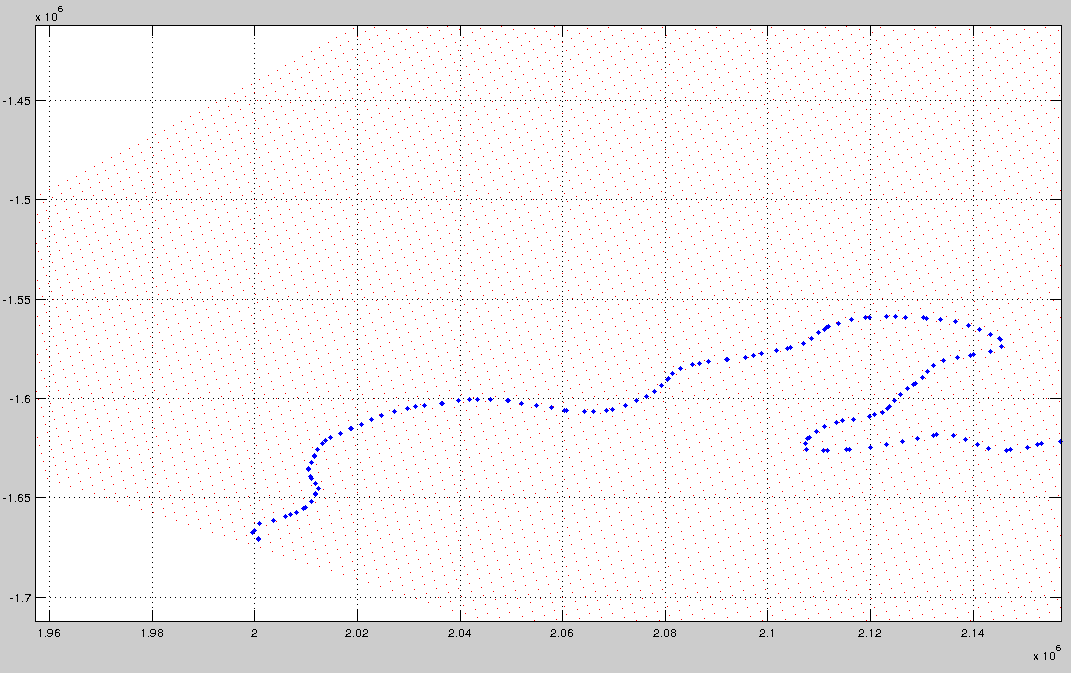
Edit - I should mention that the grid is a latitude/longitude grid, of an area fairly close to the south pole. So, the points (the red dots) are the position in metres from the south pole (using a polar stereographic representation). Since the grid is a geographic grid there is unequal grid spacing - with slightly different shaped cells (where the red dots define the vertices of the cells) due to the distortion at high latitudes.
The result is that I can't just find which row/column of the x and y matrix corresponds closest to the input point coordinates - unlike a regular grid from meshgrid, the values in the rows and columns vary...
Cheers Dave