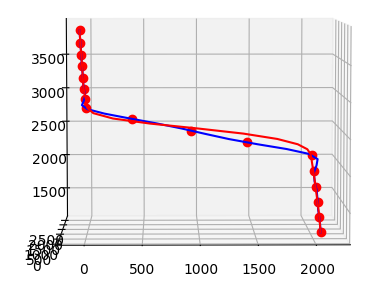
Here is the spline without constraints:
from geomdl import fitting
from geomdl.visualization import VisMPL
path = [(2077.0, 712.0, 1136.6176470588234), (2077.0004154771536, 974.630482962754, 1313.735294117647), (2077.1630960823995, 1302.460574562254, 1490.8529411764707), (2078.1944091179635, 1674.693193015173, 1667.9705882352941), (2080.5096120056783, 2086.976611915444, 1845.0882352941176), (2085.1051468332066, 2711.054258877495, 2022.2058823529412), (1477.0846185328733, 2803.6223679691457, 2199.323529411765), (948.4693105162195, 2802.0390667447105, 2376.4411764705883), (383.8615403256207, 2804.843424134807, 2553.5588235294117), (-41.6669725172834, 2497.067373170676, 2730.676470588235), (-37.94311919744064, 1970.5155845437525, 2907.794117647059), (-35.97395938535092, 1576.713103381243, 3084.9117647058824), (-35.125016151504795, 1214.2319876178394, 3262.029411764706), (-35.000550767864524, 893.3910350913443, 3439.1470588235297), (-35.0, 631.2108462417168, 3616.264705882353), (-35.0, 365.60545190581837, 3793.3823529411766), (-35.0, 100.00005756991993, 3970.5)]
degree = 3
curve = fitting.interpolate_curve(path, degree)
curve.vis = VisMPL.VisCurve3D()
curve.render()
# the following is to show it under matplotlib and prepare solutions comparison
import numpy as np
import matplotlib.pyplot as plt
qtPoints = 3*len(path)
s = np.linspace(0, 1, qtPoints, True).tolist()
pt = curve.tangent(s) # returns points and tangents
spline = [u for u, v in pt] # get points, leave tangents
I want to add constraints:
- x >= -35
- x <= 2077
- y <= 2802
The geomdl library does not propose splines with constraints. I have tried this hack, just by correcting points to stay inside the boundaries:
path2 = [(x if x >= -35 else -35, y if y <= 2802 else 2802, z) for x,y,z in spline]
path2 = [(x if x <= 2077 else 2077, y, z) for x,y,z in path2]
curve2 = fitting.interpolate_curve(path2, 3)
pt2 = curve2.tangent(s) # returns points and tangents
spline2 = [u for u, v in pt2] # get points, leave tangents
plt.plot([u[0] for u in path], [u[1] for u in path], 'o',
[u[0] for u in spline], [u[1] for u in spline], 'b',
[u[0] for u in spline2], [u[1] for u in spline2], 'r')
plt.show()
curve2.vis = VisMPL.VisCurve3D()
curve2.render()

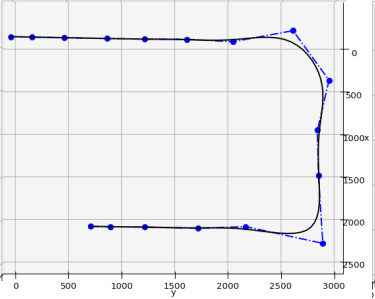
Here are both together (turned 90° left):
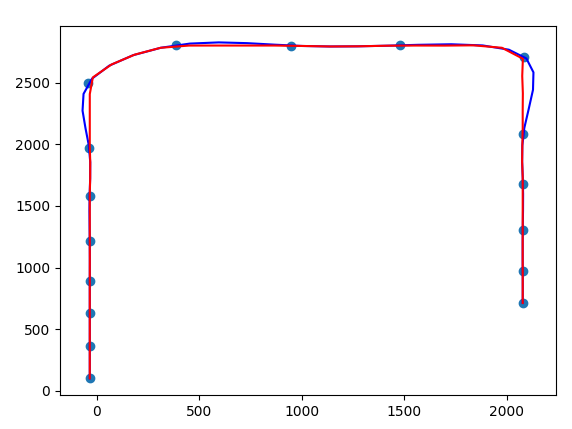
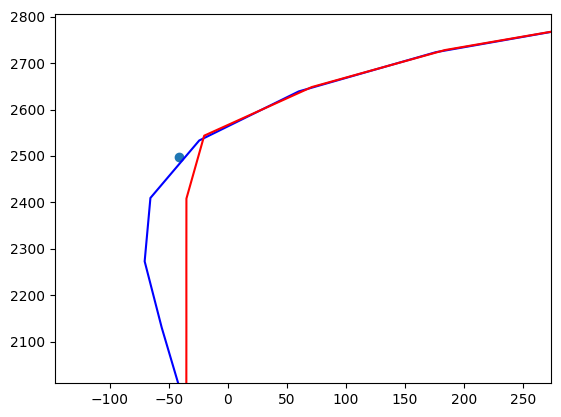
The result is not satisfactory (in red):

Another way is to use directly the path as control points. Here is the result with NURBS:
from geomdl import NURBS
curve_n = NURBS.Curve()
curve_n.degree = min(degree, len(path)) # order = degree+1
curve_n.ctrlpts = path
last_knot = len(path) - curve_n.degree
curve_n.knotvector = np.concatenate((np.zeros(curve_n.degree), np.arange(0, last_knot + 1), np.ones(curve_n.degree)*last_knot)).astype(int)
curve_n.delta = 0.05
spline_n = curve_n.evalpts
plt.plot([u[0] for u in path], [u[1] for u in path], 'o',
[u[0] for u in spline_f], [u[1] for u in spline_f], 'b',
[u[0] for u in spline2], [u[1] for u in spline2], 'r',
[u[0] for u in spline_n], [u[1] for u in spline_n], 'g')
plt.show()

The result (in green) is too far from the path.
If I use the NURBS points to perform a new fitting, and playing with the NURBS degree, I obtain something satisfactory:
from geomdl import fitting
from geomdl import NURBS
#from geomdl.visualization import VisMPL
import numpy as np
import matplotlib.pyplot as plt
path = [(2077.0, 712.0, 1136.6176470588234), (2077.0004154771536, 974.630482962754, 1313.735294117647), (2077.1630960823995, 1302.460574562254, 1490.8529411764707), (2078.1944091179635, 1674.693193015173, 1667.9705882352941), (2080.5096120056783, 2086.976611915444, 1845.0882352941176), (2085.1051468332066, 2711.054258877495, 2022.2058823529412), (1477.0846185328733, 2803.6223679691457, 2199.323529411765), (948.4693105162195, 2802.0390667447105, 2376.4411764705883), (383.8615403256207, 2804.843424134807, 2553.5588235294117), (-41.6669725172834, 2497.067373170676, 2730.676470588235), (-37.94311919744064, 1970.5155845437525, 2907.794117647059), (-35.97395938535092, 1576.713103381243, 3084.9117647058824), (-35.125016151504795, 1214.2319876178394, 3262.029411764706), (-35.000550767864524, 893.3910350913443, 3439.1470588235297), (-35.0, 631.2108462417168, 3616.264705882353), (-35.0, 365.60545190581837, 3793.3823529411766), (-35.0, 100.00005756991993, 3970.5)]
degree = 3
qtPoints = 3*len(path)
# fitting without constraints
curve_f = fitting.interpolate_curve(path, degree)
#curve.vis = VisMPL.VisCurve3D()
#curve.render()
s = np.linspace(0, 1, qtPoints, True).tolist()
pt = curve_f.tangent(s) # returns points and tangents
spline = [u for u, v in pt] # get points, leave tangents
# fitting with constraints, awkward hack
path2 = [(x if x >= -35 else -35, y if y <= 2802 else 2802, z) for x,y,z in spline]
path2 = [(x if x <= 2077 else 2077, y, z) for x,y,z in path2]
curve2 = fitting.interpolate_curve(path2, 3)
pt2 = curve2.tangent(s) # returns points and tangents
spline2 = [u for u, v in pt2] # get points, leave tangents
# control points = path
curve_n = NURBS.Curve()
curve_n.degree = 2 #min(degree, len(path)) # order = degree+1
curve_n.ctrlpts = path
last_knot = len(path) - curve_n.degree
curve_n.knotvector = np.concatenate((np.zeros(curve_n.degree), np.arange(0, last_knot + 1), np.ones(curve_n.degree)*last_knot)).astype(int)
curve_n.delta = 0.05
spline_n = curve_n.evalpts
# fitting without constraints on NURBS points
curve3 = fitting.interpolate_curve(spline_n, 3)
pt3 = curve3.tangent(s) # returns points and tangents
spline3 = [u for u, v in pt3] # get points, leave tangents
plt.plot([u[0] for u in path], [u[1] for u in path], 'o',
[u[0] for u in spline_f], [u[1] for u in spline_f], 'b',
[u[0] for u in spline2], [u[1] for u in spline2], 'r',
[u[0] for u in spline3], [u[1] for u in spline3], 'y',
[u[0] for u in spline_n], [u[1] for u in spline_n], 'g')
plt.show()

But it is not robust, and possibly just an infamous DIY.
[True if x >= -35 and x <= 2077 and y <= 2802 else False for x,y,z in spline3]
[True, False, False, False, False, False, False, False, False, False, False, False, False, False, True, True, True, True, True, True, True, False, False, False, False, True, True, True, True, True, True, True, True, False, False, False, False, False, False, False, False, False, False, False, False, True, False, False, True, True, True]
How to keep it smooth, on the path, and whith respect to the constraints please, possibly with another library? I found this, but that solves derivatives constraints and I don't figure out how to adapt this solution. I raised also the question on a strictly mathematical point of view here.