My a* algorithm doesn't always take the shortest path.
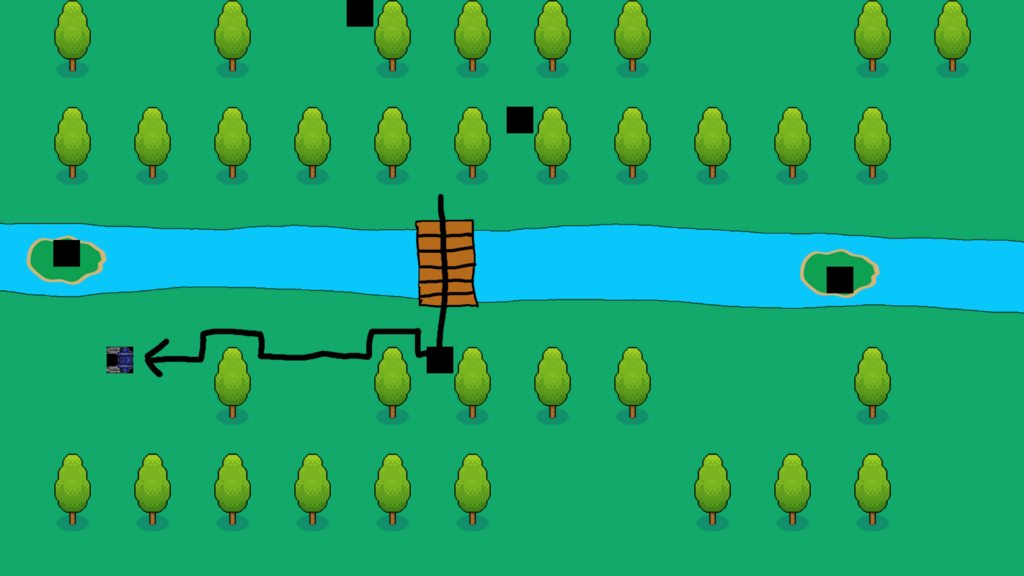
In this image the robot has to traverse to the black squares, the river and trees are obstacles. The black line is the path it took, which is clearly not the shortest path as it should not have dipped.
https://i.sstatic.net/0ws5E.jpg
{kind=link}
Here is my code for a* and the heuristic I am using:
def HeuristicCostEstimate(start, goal):
(x1, y1) = start
(x2, y2) = goal
return abs(x1 - x2) + abs(y1 - y2)
def AStar(grid, start, goal):
entry = 1
openSet = []
heappush(openSet,(1, entry, start))
cameFrom = {}
currentCost = {}
cameFrom[tuple(start)] = None
currentCost[tuple(start)] = 0
while not openSet == []:
current = heappop(openSet)[2]
print(current)
if current == goal:
break
for next in grid.Neighbours(current):
newCost = currentCost[tuple(current)] + grid.Cost(current, next)
if tuple(next) not in currentCost or newCost < currentCost[tuple(next)]:
currentCost[tuple(next)] = newCost
priority = newCost + HeuristicCostEstimate(goal, next)
entry +=1
heappush(openSet,(priority, entry, next))
cameFrom[tuple(next)] = current
return cameFrom, current
Thanks for any help! And feel free to ask me to clarify anything.
Edit: removing the heuristic by returning 0 solves this problem. Which suggests the problem lies with my heuristic. Would anyone know what might be causing it?